1
CENTRO EDUCATIVO SALESIANOS TALCA
Especialidad de Electrónica
Módulo
MANTENIMIENTO Y OPERACIÓN DE
EQUIPOS ELECTRÓNICOS DE POTENCIA
Nombre Alumno:
Curso :
R.U.N :
Docente:
Fernando Tapia Ramírez
Introducción
Este módulo está asociado al área de competencia “Montar, instalar y desmontar
componentes, dispositivos y equipos electrónicos” y “Mantener y operar dispositivos y
equipamiento electrónico”. Es de carácter obligatorio y para su desarrollo se requiere de
180 horas.
Dicho módulo presenta como objetivo principal desarrollar en el alumno y alumna la
capacidad de operar y mantener los sistemas de control electrónico, de amplia utilización
a niveles industriales y comerciales. En él, el alumno y alumna:
•
Identifica y analiza las técnicas utilizadas para el control electrónico de la potencia
eléctrica.
•
Aplica técnicas de análisis y de diseño de sistemas electrónicos utilizadas en
procesos industriales, en el área de la inversión y la conversión de la energía
eléctrica.
•
Mide, prueba, opera, calibra, establece diagnósticos de fallas y repara equipos
controladores de potencia.
•
Modifica, analiza y documenta circuitos de control electrónico de potencia.
•
Resuelve problemas prácticos en circuitos de control electrónico de potencia. El
presente módulo puede ser asumido a partir del dominio de conceptos básicos
involucrados en el módulo de medición y análisis de componentes y circuitos
electrónicos, sistemas digitales, diseño y operación de sistemas de control
eléctrico y operación con sensores.
•
Respecto a la relación con otros sectores de la Formación General, el módulo
presenta la oportunidad de reforzar y complementar, en un contexto de aplicación,
los siguientes aprendizajes:
Matemática:
Operatoria básica con números reales y resolución de ecuaciones.
Física y química:
El trabajo con sensores, permite estudiar un sinnúmero de fenómenos de transformación
de energía, parámetros físicos con sus correspondientes unidades y formas de medición.
Lenguaje y Comunicación:
Lectura comprensiva de instrucciones, elaboración de informes y conclusiones a partir de
observaciones.
Idioma extranjero (Inglés):
Traducción e interpretación de manuales y catálogos.
Mantenimiento y operación de equipos electrónicos de potencia
2
Materiales Necesarios.
•
Cuaderno Universitario 100 Hojas Aproximadamente.
•
Lápiz Grafito.
•
Goma de borrar.
•
Lápices pasta de 3 colores diferentes.
•
Transportador.
•
Calculadora científica con las siguientes funciones: Modos DEG y RAD,
Funciones trigonométricas, Conversor de coordenadas polares a rectangulares y
viceversa, trabajo de números con notación científica (10x) y en lo posible su
respetivo manual suministrado por el fabricante.
•
Disponibilidad de un PC, Pentium 133 MHz, 32 MB RAM, Windows 95, como
mínimo y acceso a Internet, de 1 Hora semanal.
•
Diccionario Inglés Español.
Mantenimiento y operación de equipos electrónicos de potencia
3
Contenidos
Fundamentos y aplicaciones del control de potencia:
•
Control por atenuación.
•
Control por conmutación.
•
Modulación por amplitud de pulsos (PAM).
•
Modulación por ancho de pulso (PWM).
•
Modulación por frecuencia (PFM).
Circuitos discretos e integrados para la modulación de pulsos:
•
Circuitos de disparo, aislación y acoplamiento.
•
Configuraciones circuitales para la etapa de potencia.
Semiconductores para las etapas de potencia:
•
Tiristores.
•
Transistores bipolares.
•
MOSFET.
•
IGFET
Inversores:
•
Inversión de CA a CC.
•
Inversión de CC a CA.
Convertidores:
•
Conversión de CC a CC.
•
Conversión de CA a CA.
Fundamentos, propiedades y circuitos para el control automático.
Mantenimiento y operación de equipos electrónicos de potencia
4
Nivelación Cálculos Eléctricos de
Potencia
Mantenimiento y operación de equipos electrónicos de potencia
5
TEMA 1-
COMPENSACIÓN MONOFÁSICA
En los artefactos e instalaciones eléctricas se transforma la energía eléctrica e otros
tipos de energía. La parte aprovechable de la energía transformada puede obtenerse a
partir de la potencia activa. Sin embargo, las bobinas dan lugar a una reactancia inductiva
nociva, pues hacen que por los conductores de alimentación circulen corrientes más
intensas. A partir de una determinada intensidad deberán compensarse estas corrientes
mediante conexiones especiales de condensadores.
El ejemplo siguiente nos permitirá aclarar el tema de la compensación eléctrica
monofásica: Una instalación eléctrica conectada a la red monofásica de 220 V, con un
factor de potencia medio de 0.6 , se compone de los siguientes circuitos:
220 V
A
Circuito de alumbrado fluorescentes
1.1 KW
Circuito de fuerza: motores
3 KW
Circuito alumbrado incandescentes 2.2 KW
47.7
COS ϕ m 0.6
Fig. 1. Magnitudes medidas en una instalación eléctrica con
cargas resistivas e inductivas (circuito RL).
L 1 2.2 KW
M 1 3 KW
L2 1.1 KW
Con los valores de: factor de potencia, tensión aplicada y el de la potencia activa
total, podemos calcular los valores siguientes:
P= PL1 + PM1 + PL2 = 2.2 + 3 + 1.1 = 6.3 KW
S= P/ Cos ϕ = 6.3 / 0.6 = 10.5 KVA
QXC = S . Sen ϕ = 10.5 . 0.8 = 8.4 Kvar
La única parte útil es la potencia activa, que vale 6.3 KW. Si la instalación eléctrica
fuera sólo circuito resistivo, debería circular una corriente de línea de 28.6 A.
I = P / V = 6 300 / 220 = 28. 6 A
A causa de la reactancia inductiva, circula no obstante una corriente más intensa, de
47.7 A, que también deberá tomarse de la red de distribución. Por otro lado, una corriente
más intensa provocará también unas pérdidas mayores en los conductores de
alimentación de la instalación eléctrica.
Como la mayoría de las cargas que se presentan en las instalaciones industriales
son
resistivas en combinación con bobinas (circuito RL), se podrán instalar
condensadores para compensar la instalación eléctrica, pues como hemos visto en los
estudios anteriores (circuitos RLC), los condensadores ofrecen un comportamiento
opuesto a las bobinas.
Mantenimiento y operación de equipos electrónicos de potencia
6
Como el fenómeno que se produce en las bobinas y condensadores son físicamente
opuestos, el sentido de sus respectivos vectores1 de potencia reactiva es también
opuesto. De aquí que los condensadores contrarresten los efectos de las bobinas y que el
ángulo formado por la potencia aparente y la potencia activa se modifique mediante el uso
de condensadores, debido a la diferencia matemática en el largo de las magnitudes de los
vectores reactivos de las bobinas (QXL) y los condensadores (QXC).
En síntesis, en una instalación eléctrica, las potencias reactivo inductiva (QXL)
se compensan mediante potencias reactivo capacitivas (QXC).
Continuando con nuestro ejemplo de compensación, la figura 2 nos muestra en
forma simplificada la instalación eléctrica, la cual se encuentra dividida en un resistor y
una reactancia inductiva. La corriente reactiva IXL (o bien QXL) debe compensarse con otra
corriente reactiva IXC (o bien QXC) proporcionada por la conexión de un condensador al
circuito (fig.3), de manera que el circuito total resultante sea lo más cercano a un circuito
resistor puro.
Fig. 2 Circuito equivalente de la instalación eléctrica
(Circuito RL)
Fig. 3 Compensación en paralelo de una carga
inductiva (Circuito RLC)
Para obtener la capacidad del condensador necesario, para una compensación
monofásica, se determinaran los valores eléctricos de calculo considerando el circuito
como si estuviera en resonancia (Cos ϕ =1), es decir QXL = QXC (8.4 Kvar)
QXC = V . IXC
2
QXC = V / XC
C=
Remplazando IXC por IXC = V / XC
Se tendrá que:
Remplazando XC por XC = 1 / 2 π f C
Se obtiene:
QC
2⋅π⋅F ⋅V
C=
2
8400
2 ⋅ π ⋅ 50 ⋅ 220 2
= 552 µF
Para una Potencia reactiva de 8.4 Kvar, tendremos una capacidad de 552 µF. Para
compensar 1 Kvar se precisará un valor proporcionalmente menor:
552 µF
8.4 K var
1
=
C
= 66 µF
1 K var
Recuerde el diagrama vectorial de potencia de un circuito RLC
Mantenimiento y operación de equipos electrónicos de potencia
7
Un condensador con una capacidad de 66 µF permite compensar una potencia
reactivo inductiva de 1 Kvar, en una instalación eléctrica de 220 V – 50 Hz.
Es importante recalcar nuevamente que , en las instalaciones eléctricas industriales,
no se suele compensar hasta alcanzar un valor de Cos ϕ =1, pues entonces podrían
aparecer fenómenos de resonancia.
Ahora bien, para calcular el valor de la potencia reactivo capacitiva de una
instalación eléctrica, se emplea una fórmula mediante los valores de la tangente fi (tg ϕ),
que sustituye los valores del ángulo de desfase de la instalación (tg ϕ1) y del ángulo de
desfase que se quiera llegar después de la compensación (tg ϕ2). Mediante los diagramas
vectoriales de potencia en los circuito RL y RLC se puede obtener la relaciones para
obtener la potencia reactiva. El único valor que no cambia es la potencia activa.
Qc = P (tg ϕ 1 - tg ϕ2)
Para el ejemplo que citamos anteriormente el factor de potencia medio vale 0.6, con
lo que ángulo de desfase es de ϕ1 = 53.1° (tg ϕ 1 = 1.332). Si se quiere compensar la
instalación a un factor de potencia de 0.95, el ángulo de desfase será de ϕ2 = 18.2°(tg ϕ2 =
0.3287). La potencia reactiva consumida por el condensador será entonces :
Qc = P (tg ϕ 1 - tg ϕ2) = 6.3 KW (1.332 – 0.3287) = 6.32 Kvar
Aplicando la fórmula de la capacidad (o la equivalencia de 1Kvar = 66 µF), se tendrá
que para este valor de potencia se precisa un condensador de 416 µF .
Para poder determinar el valor del factor de potencia las empresas distribuidoras de
energía eléctrica conectan a las instalaciones eléctricas industriales de cada usuario,
medidores de energía activa y medidores de energía reactiva. La energía reactiva es un
componente de la energía total (la aparente) que debe transmitirse hasta el consumidor,
pero que obliga a sobredimensionar las instalaciones eléctricas, lo que implica una mayor
inversión en ellas.
La legislación vigente restringe a una proporción mínima determinada la relación
entre la energía activa y la energía reactiva. Del valor de este cuociente se obtiene el Cos
ϕ o factor de potencia, cuyo valor mínimo aceptable, para no incurrir en recargos, es de
0.93, vale decir, no tienen recargo los valores comprendidos entre 0.93 y 1.
Al mejorar el factor de potencia en una instalación eléctrica industrial se tendrá:
•
•
•
•
Una disminución de la corriente en la línea de alimentación
Una menor caída de tensión en los conductores.
Una menor Pérdida de energía. Obteniendo un mejor rendimiento de las máquinas.
Una disminución del recargo en la cuenta de suministro eléctrico.
Mantenimiento y operación de equipos electrónicos de potencia
8
q
TRABAJO INDIVIDUAL
(preguntas de repaso)
1.
2.
3.
4.
5.
¿Qué se entiende por compensación?
¿Qué es el factor de potencia?
¿A qué se debe un bajo factor de potencia en una instalación eléctrica industrial?
Realiza los diagramas vectoriales en que se demuestre la disminución del ángulo de desfase
¿Cómo determinan las empresas suministradoras de energía eléctrica el factor de potencia de
la instalación?
6. En una instalación eléctrica de 220 V – 50Hz, con una potencia activa de 120 KW se debe
compensar el Cos ϕ 0.5 hasta llegar a 0.9. ¿Cuál deberá ser la capacidad del condensador
adicional?
7. ¿Qué efectos tiene un bajo factor de potencia?
8. ¿Qué efectos tiene un buen factor de potencia?
q
INVESTIGACION
Busca información del procedimiento de recargo, en la facturación de un bajo factor de potencia
por parte de las empresas suministradoras de energía eléctrica.
& Ejemplo de procedimiento de cálculo.
Una equipo fluorescente, de 220 V – 40 W, tiene un factor de potencia de 0.5 y toma una
corriente de servicio de 0.455 A. El factor de potencia debe ser mejorado a cos ϕ = 0.95, por
medio de una compensación en paralelo. Calcular:
a) La absorción de potencia del equipo fluorescente;
b) La potencia reactiva necesaria del condensador;
c) La capacidad del condensador;
d) La corriente después de la compensación.
þ Solución :
P1 = V . I . cos ϕ = 220 . 0.455 . 0.5 = 50 W
Qc = P1 (tg ϕ1 - tg ϕ2) = 50 (1,732 – 0, 3287) = 70,165 VAR
QC
70,165
C=
= 4,61 µF
=
2
2 ⋅ π ⋅ 50 ⋅ 220 2
2⋅π⋅F⋅ V
P1
50
=
I=
= 0,24 A
V ⋅ Cos ϕ 2
220 ⋅ 0.95
a)
b)
c)
d)
•
Ejercicios de aplicación.
1. La corriente que circula por un motor monofásico de 220 V/1.5 KW, es de 14 A. El
motor tiene un factor de potencia de 0.8. Por compensación en paralelo se debe
mejorar el factor de potencia a 0.95. Determine:
a) El rendimiento del motor;
b) La capacidad del condensador necesario para la compensación;
c) La corriente después de la compensación;
2. En una conservadora con aire acondicionado funcionan, en servicio, dos motores de
corriente alterna, simultáneamente.
Motor del compresor
M1: 220 V/2 KW;
I= 23.2 A;
Cos ϕ 0.56
Motor del ventilador
M2: 220 V/0.5 KW; I= 9.1 A;
Cos ϕ 0.5
La conservadora debe ser compensada a un factor de potencia Cos ϕ m2 0.9. Calcule:
Mantenimiento y operación de equipos electrónicos de potencia
9
a)
b)
c)
d)
La corriente en la línea de alimentación sin compensación;
El factor de potencia medio Cos ϕ m1;
La capacidad del condensador necesario para la compensación;
La corriente con la compensación.
Mantenimiento y operación de equipos electrónicos de potencia
10
Medición del factor de potencia (f.p.) con un amperímetro y un voltímetro.
El siguiente procedimiento, a conocer, corresponde a una técnica de medición indirecta de
una magnitud la que es muy importante de conocer en una instalación eléctrica y que nos
condiciona directamente su buen funcionamiento y aprovechamiento adecuado de la
energía. Como requisito elemental, solo queda mencionar que para la buena
interpretación del método, se sugiere en lo posible el uso de instrumentos digitales, los
cuales nos permitirán trabajar con a lo menos 2 decimales. Este método es muy práctico
por que en ocasiones no tenemos un cofímetro disponible.
Materiales necesarios para su ejecución.
•
•
•
Amperímetro digital.
Carga resistiva pura, por ejemplo una estufa de barras de micrón.
La carga a la cual debemos averiguar su factor de potencia.
Procedimiento:
a) Conectar en paralelo la carga resistiva con la carga que se desea medir el f.p. (puede
ser un motor o directamente la entrada a una instalación eléctrica desconocida)
b) Registrar los valores RMS de la corriente que entrega la fuente, la corriente que pasa
por la resistencia y la corriente que pasa por la carga.
c) Ahora resuelve tu problema como un análisis vectorial y aplicando las leyes de
Kirchoff suponiendo que el ángulo del voltaje es cero y calcula el ángulo. A partir de
dicho análisis, aparece la siguiente expresión, la cual nos da el coseno del ángulo
Beta,
por lo tanto, el ángulo se obtiene a través del uso de la expresión trigonométrica inversa.
β = Arctg (β )
Mantenimiento y operación de equipos electrónicos de potencia
11
Luego calculamos el factor de potencia, con
fp = cos(180 − β )
Recordar que:
IR, es la corriente de la carga puramente resistiva.
IL, es la corriente de la carga a la cual deseamos conocer su factor de potencia.
IT, es la corriente total producida por el sistema.
Ejemplo de cálculo.
El siguiente circuito, corresponde al modelamiento, de un motor eléctrico, al cual le
deseamos medir su factor de potencia. Se asume que dicho motor se encuentra
funcionando en condición de régimen permanente.
Calculamos el coseno de Beta
I R + I L − IT
0,948 2 + 0,5252 − 1,179 2
=
= −0,2176
2I R I L
2 × 0,948 × 0,526
2
Cosβ =
2
2
β = Arctg ( β ) = Arctg (−0,2176) = 102.56°
fp = cos(180 − β ) = cos(180 − 102.56°) = 0,22
Lo cual, se interpreta como un factor de potencia inadecuado y que debe ser mejorado.
Mantenimiento y operación de equipos electrónicos de potencia
12
Ejercicio.
Determine el factor de potencia del sistema que a continuación se muestra.
Mantenimiento y operación de equipos electrónicos de potencia
13
TEMA 1-
Aplicaciones del Sistema Trifásico
Un sistema trifásico, se modela a través del uso de tres generadores monofásicos, los cuales
tienen la particularidad de tener cada una de sus fases desfasadas en 120 grados una de la
otra, a partir de ello, podemos deducir que nunca las tres fases llegan a su punto máximo ni
menos a su punto mínimo al mismo tiempo.
Mantenimiento y operación de equipos electrónicos de potencia
14
& Ejemplo:
En conexión triángulo, un horno de templado absorbe de la red 220/380 V, una potencia de 9
KW. Para bajar la potencia es posible la conmutación en estrella. Calcule:
a) la potencia y la resistencia de fase, en conexión triángulo;
b) La corriente de fase y de línea en conexión triángulo;
c) La potencia total en conexión estrella;
d) La corriente, en conexión estrella
þ Solución :
a) Pf∆ = P∆ / 3 = 9 / 3 = 3 KW = 3000 W
Rf = V2 / Pf = 3802 / 3000 = 48.13 Ω
b) If = V / R = 380 / 48.13 = 7.89 A
I=
2
2
c) PfΥ = VfΥ / Rf = 220 / 48.13 = 1000 W = 1 KW
d) I = Vf/ R f = 220 / 48.13 = 4.57 A
o bien
3 · If =
3 · 7.89 = 13.67 A
PΥ = 3 · PfΥ = 3 · 1 = 3 KW
I = PΥ / 3 · V = 3000 /
3 · 380 = 4.56 A
1.
Las tres espirales de calefacción de un termo eléctrico trifásico conectado en
estrella, consumen una corriente de 9.1 A. Calcule la potencia del termo y la
resistencia de una de las espirales de calefacción.
2.
Un horno industrial absorbe, en conexión estrella de una red 220/380 V, la potencia
de 12 KW. Dibuje el circuito y complete los valores eléctricos. Calcule: La corriente
de línea y, la tensión, resistencia y potencia de fase;
3.
Los tres resistores de un horno de panadería tienen 32 Ω cada uno y están
conectados en estrella. La tensión nominal es de 380 V. Calcule para ambas
conexiones Y∆. : La tensión, la corriente y la potencia, de fase y de línea.
8. Calcule con los datos de la placa de
características S, P1, Q,η
Tipo: DJ 198 CA 24
AEG
∆ 380 V
COS ϕ 0.80
Clase aislam. P33
Mantenimiento y operación de equipos electrónicos de potencia
M3∼
I 9A
1.435 rpm
4 KW
50 hz
VDE D530/69
15
TEMA 2-
El Motor de Inducción
La Electrónica de Potencia, al igual que la “Electrónica de Señales débiles”, requiere del
conocer el funcionamiento de máquinas y equipos a operar, debido a que no tiene ningún
sentido, el contar con el
gran
universo
de
dispositivos presentes en
el mercado, sin que
tengan
una
utilidad
práctica. Es por ello, que
con el propósito de
orientar la operación de
los dispositivos a estudiar
en el presente curso,
procederemos a conocer
el
funcionamiento
y
parámetros relevantes de
un motor de corriente
alterna,
centrándonos
específicamente en la
versión mas utilzada que
corresponde al motor de
inducción.
Los motores de corriente
alterna serán tus
compañeros de días y
noches en tus procesos
por eso es importante que
sepas cuidarlos y operarlos.
Los motores son maquinas eléctricas comunes pero de modelos variados que encontraras
en las industrias de diferentes tipos de procesos.
Los motores de corriente alterna son los de mayor campo de aplicación, tanto en el
ámbito domestico como en el industrial.
Los motores asincrónicos trifásicos.
La mayor parte de las máquinas
industriales está movida por motores
asincrónicos trifásicos, es decir,
motores que reciben la energía
eléctrica en forma de corriente alterna
de tres fases o hilos, y la transforman
en energía mecánica.
Estos motores tienen un uso industrial
muy generalizado debido a su sencillez
de construcción, su robustez y, su fácil
mantenimiento y su ventajoso precio.
Mantenimiento y operación de equipos electrónicos de potencia
16
Partes estructurales del motor.
Los motores asincrónicos trifásicos, al igual que los motores de corriente continua, están
compuestos de un estator o parte fija y de un rotor que es la parte móvil.
El estator es la parte fija del motor, está formada por la carcasa, que está construida por
chapas de acero provistas de ranuras, donde se introducen tres bobinas inductoras, cuyos
extremos van conectados a la placa de bornes, desde la cual el motor se conectará a la
red de alimentación.
El rotor es la parte móvil que va girando en el interior
del estator. El llamado rotor jaula de ardilla se compone
de una serie de conductores metálicos ensamblados en
dos coronas también metálicos, cuyo aspecto es
parecido a una jaula que forman un cilindro metálico
montado en un eje que gira sobre rodamientos. Este
motor también se conoce como el motor de inducción.
Funcionamiento.
En primer lugar, la corriente trifásica a la que se conecta el motor se utiliza
exclusivamente
para que circule
por las bobinas
inductoras
del
estator con el fin
de que se genere
en la máquina un
campo magnético
que, en este caso,
Mantenimiento y operación de equipos electrónicos de potencia
17
es giratorio. En segundo lugar, en los conductores que forman el rotor se inducen
corrientes eléctricas, como consecuencia del campo magnético giratorio, originándose
también otro campo magnético giratorio con velocidad menor que el campo magnético
rotatorio del estator. Este campo magnético atrasado trata de alcanzar al campo
magnético rotatorio del estator y lleva al rotor haciendo que éste gire y el motor funcione.
Velocidad de giro.
En el motor asincrónico trifásico en funcionamiento, hemos de distinguir dos
velocidades, la del campo magnético y la del rotor.
La velocidad de giro del campo magnético, “n1”, viene determinada por la expresión:
n1 =
60 ⋅ f
p
Donde:
n1 = Velocidad de giro del campo magnético rotatorio (rpm)
f = frecuencia de la corriente alterna (Hz)
p = número de pares de polos.
La velocidad de giro del motor “n2”. No puede ser igual a n1, ya que en ese caso no se
generarían corrientes inducidas en los conductores del rotor y en consecuencia tampoco
se generaría ninguna fuerza electromagnética sobre ellos, con lo que el motor no
funcionaría. Por esta razón estos motores reciben el nombre de asincronos.
La diferencia de velocidades entre la velocidad del campo magnético rotatorio y la
velocidad del rotor se denomina deslizamiento que no es más allá de 40 rpm.
s=
n1 − n 2
× 100
n1
Ejemplo de Cálculo
Calcular la velocidad de giro del campo magnético de un motor asíncrono de seis polos
que está conectado a una red de corriente alterna de frecuencia 50 Hz. Calcular también
la velocidad de giro del rotor si el motor trabaja con un deslizamiento del 4 %
Aplicamos directamente la expresión para calcularla velocidad de giro del campo
magnético
N1 = 60 f / p
n1 = 60 x 50 / 3 n1= 1000 rpm.
A partir de este dato despejamos n2 que es la velocidad del rotor del motor.
S = {(n1- n2) / n1 } x 100
Mantenimiento y operación de equipos electrónicos de potencia
18
n2 = n1 (1- s / 100)
n2 = 1000 (1- 4/100)
n2 = 960 rpm.
El campo magnético gira a 1000 rpm y el rotor a 960 rpm.
Ejercicio
Complete la siguiente tabla, con los valores que se piden:
Frecuencia Polos
50 Hz
100 Hz
85 Hz
4
2
N1
N2
S
Motor o
generador
7500rpm
1500rpm
1700rpm
4
5%
1%
1700rpm
Características Eléctricas de los motores trifásico de corriente alterna.
ü En el instante de arrancar, la velocidad de giro del rotor es casi cero. En ese
momento la intensidad absorbida es
de seis veces la intensidad nominal,
que es llamada la corriente de partida
y el par motor es 1,5 veces el par
nominal.
ü Durante el periodo de aceleración, la
intensidad va reduciéndose
progresivamente. El par en cambio
disminuye al inicio, pero luego
aumenta hasta llegar al máximo
cuando la velocidad de giro es el 75% de la velocidad nominal.
ü Cuando el motor alcanza su valor nominal de velocidad, tanto la intensidad
absorbida como el par motor se aproximan mucho a cero al estar sin carga en el
eje.
ü El arranque de estos motores puede ser directo o indirecto
Mantenimiento y operación de equipos electrónicos de potencia
19
ü El arranque directo el motor se pone en servicio conectado directamente a la línea
de alimentación sin dispositivos de ajuste de la tensión de entrada que ajusten la
corriente de partida del motor.
ü Los motores de bajas potencias se conectan en forma directa a las líneas
trifásicas. En el arranque indirecto la tensión que se aplica al motor en el momento
de ser puesto en servicio es una tensión reducida por dispositivos como partidores
suaves, autotransformadores, métodos de conexión, etc. Los que al reducir la
tensión de alimentación reducen las corrientes de partida de los motores.
Mantenimiento y operación de equipos electrónicos de potencia
20
Mantenimiento y operación de equipos electrónicos de potencia
21
Unidades de Potencia
Caballo de vapor 1 CV
Caballo de fuerza 1 HP
Unidad de potencia eléctrica, equivale a 0,745 KW.
Unidad de potencia eléctrica, equivale a 0,745
W.
Circuito de control o de mando de un motor eléctrico y sus protecciones
elementales.
El circuito de mando o de control
esta compuesto por todos los
dispositivos de comando como
botoneras,
interruptores,
selectores,
switch,
relés
temporizadores, lámparas pilotos
de indicación, switch de limite de
carrera,
alarmas
luminosas,
sensores inductivos, fotoceldas,
palancas de mando, etc. Todo
los elementos con los cuales tu
operas en forma directa o
indirecta la partida o la parada de
un equipo.
Los dispositivos de control
permiten o interrumpen la
comunicación de la tensión de
control
hasta
el
elemento
actuador que es quien opera
cerrando
o
abriendo
los
contactos para comunicar la
alimentación de la potencia
eléctrica al motor.
Estos
dispositivos
están
preparados
con
contactos
abiertos y cerrados comunicados con mecanismos encapsulados los que al ser
accionados abren los contactos normalmente cerrados y cierran los contactos
normalmente abiertos.
Definiciones:
Corto circuito: Un cortocircuito es un circuito en el que se efectúa una conexión
directa, sin resistencia, inductancia ni capacitancia apreciables, entre los
terminales de la fuente de fuerza electromotriz.
Falla de aislación: Vía de baja resistencia en materiales que normalmente son
aislantes, en donde se produce la circulación de la corriente eléctrica debido
anomalías.
Sobrecarga: Se produce sobrecarga cuando los artefactos conectados a un
circuito determinado sobrepasan la potencia para la cual está dimensionado el
circuito, haciendo actuar normalmente a las protecciones.
Mantenimiento y operación de equipos electrónicos de potencia
22
Falla eléctrica: Se define falla eléctrica, a aquella anomalía que ocurre en un
circuito eléctrico, derivado del paso de la corriente eléctrica.
Código de colores del conductor: Colores empleados en las instalaciones eléctricas,
en donde, cada línea se señaliza de la siguiente forma:
L1
L2
L3
N
T. Protección
Azul
Negro
Rojo
Blanco
Verde, Amarillo, Verde-Amarillo
Actuación de la protección: se denomina así al momento en el cual una
protección eléctrica cualquiera, realiza la desconexión de un circuito eléctrico.
Tipos de protección eléctrica elementales.
Protección contra corto circuito: es la protección
encargada de realizar una desconexión del circuito en donde
se produjo un corto circuito. Esta protección protege a la
instalación. Se clasifican por la corriente de ruptura y tipo en
el cual actuaron. Generalmente lo encontramos como un
fusible o un disyuntor magneto térmico. Su conexión es en
serie al circuito que se desea proteger, interrumpiendo la
línea activa o fase.
Protección contra fallas de aislación: en el primer capítulo
de este módulo, estudiamos una serie
de riesgos eléctricos, uno de ellos, es
aquel en donde un operario sufre una
descarga eléctrica por el simple hecho
de tocar un máquina que tenía una carcaza metálica. Ahora bien, la
forma de funcionamiento es esta protección se basa en un principio
físico que se refiere a que la suma vectorial de la corriente de
entrada de un circuito eléctrico, mas la suma de la corriente de
salida de este debe ser igual a cero. Por ejemplo si medimos la
corriente que entra a una lámpara, esta debe medir lo mismo en la
salida, de este modo si la sumamos, su valor debe ser igual a cero.
Mantenimiento y operación de equipos electrónicos de potencia
23
Protección contra sobrecargas (motores): El relé térmico es un dispositivo que permite
proteger un circuito de sobrecorriente, que pueden ser graduales por problemas de
consumo excesivo, fallas a masa no directas, motores con
problemas de sobrecarga mecánica, una fase menos en el
circuito, etc. El relé térmico, interruptor térmico, protección
térmica y cualquier otro tipo de protección que tenga incluido
este sistema de desconexión automática, protegerá el circuito
de estas anomalías de funcionamiento.
Protección contra asimetrías de tensión e inversión de la
secuencia de fase: Dicha protección, permite detener el
circuito de alimentación del motor de inducción, de manera
indirecta. La primera forma que la acciona, corresponde a una
caída de tensión previamente configurada, la cual al no ser
detectada a tiempo puede producir severos daños al motor
eléctrico, debido a que una baja de tensión, producirá un
aumento en la corriente consumida, al encontrarse este con
carga. En el caso siguiente, una inversión o secuencia de fase inadecuada, haría que el
motor cambie su sentido de giro y como consecuencia podríamos producir daños al
sistema mecánico que se encuentra en movimiento. En el circuito que se muestra a
continuación, se expone la secuencia de arranque del motor de inducción, como se
observa, al arrancar el motor, se produce una corriente de partida elevada (·3 a 5 veces
su valor nominal), hasta luego estabilizarse en su valor nominal. En el siguiente
diagrama, se expone la simulación del resultado que nos dará a entender la necesidad de
un relé de asimetría.
Mantenimiento y operación de equipos electrónicos de potencia
24
Resultados obtenidos al suprimir una de las fases del sistema.
Como se observa, la falta de una de las fases en el sistema, produce un incremento de la
corriente nominal en el motor, que se resume en la adición de la corriente de la restante
en las otras dos presentes.
Algunos dispositivos utilizados para el mando de un motor eléctrico, se muestran a
continuación.
Botoneras. Son dispositivos que están provistos de contactos
cerrados y abiertos y lámparas
piloto que permiten indicar el
estado de operación en tiempo
real del equipo que se está
operando.
La botoneras tiene colores
estandarizados
como
se
muestra en la tabla siguiente:
Su interpretación por color se
muestra en la siguiente página.
Mantenimiento y operación de equipos electrónicos de potencia
25
Para las luces piloto indicadoras de estados de operación de los equipos también esta
codificado los colores de funcionamiento
Relés. Los relés están compuestos por contactos abiertos y cerrados acoplados al núcleo
móvil de una bobina que al
ser recorrida por una
corriente eléctrica acciona
este núcleo accionando los
contactos y cambiando los
de estado.
Existen también relés de
estado sólido
que son
materiales semiconductores
encapsulados que según
características de voltajes
en sus junturas permiten el
paso
de
la
corriente
eléctrica, dichos dispositivos
Mantenimiento y operación de equipos electrónicos de potencia
26
serán estudiados en mas profundidad en la unidad siguiente.
Existe una variedad de relés que permiten controlar
tiempo, distancias, posiciones, etc. Lo que va dando las
condiciones de operación de la secuencia de control según
las características diseñadas en el circuito de control.
Los circuitos de control son muy variados y quedan
sujetos a estándares eléctricos, pueden ser muy sencillos
como la partida de un motor o muy complejos cuando son
parte de una secuencia de operación que encierra
condiciones variadas de operación y control.
Circuitos Prácticos para el arranque de un motor trifásico.
Arranque de un motor trifásico, a través del uso de un interruptor monopolar.
(Básico)
Esquema de fuerza
Esquema de mando
Mantenimiento y operación de equipos electrónicos de potencia
27
Arranque de un motor trifásico, a través del uso de una configuración de
contactores marcha paro y lámparas indicadoras de marcha y fallo del relé de
sobrecarga.
Esquema de fuerza
Esquema de mando
Para producir el arranque del motor, es necesario que el pulsador SB2 se cierre
esporádicamente de modo de excitar el contactor KM1, en caso de una falla de
sobrecarga, los contactos 97 y 98, se cerrarán suprimiento la alimentación a KM1 y
encendiendo la lámpara de aviso HL2.
¿ Que misión cumple SB1?
¿Que misión cumple la lámpara HL1?
Mantenimiento y operación de equipos electrónicos de potencia
28
ü Actividad de síntesis.
1. Mencione dos diferencias entre el motor de inducción jaula de ardilla y el motor
universal.
2. Dibuje las partes principales del motor de inducción trifásico.
3. ¿Cómo se produce el giro en el motor de inducción trifásico?.
4. Calcule la velocidad de giro de un motor de inducción trifásico, si funciona en nuestro
país y posee 4 polos. Calcule además el deslizamiento si su velocidad de giro es
1500rpm. A partir de ello, indique si está funcionando como motor o generador.
5. ¿Qué entiende por deslizamiento?
6. Refiérase a 4 características eléctricas del motor de inducción.
M3∼
I 9A
4 KW
∆ 380 V
AEG
1.435 rpm 50 hz
COS ϕ 0.80
Clase aislam. P33
VDE D530/69
Potencia aparente, potencia activa, potencia reactiva, rendimiento, y el dimensionamiento
completo de todas las protecciones del sistema.
7. Calcule con los datos de la placa de
característica
Tipo: DJ 198 CA 24
8. Diseñe un circuito de mando electromagnético que permita el arranque de un motor
trifásico con el uso de dos pulsadores de mando y 3 de paro.
Mantenimiento y operación de equipos electrónicos de potencia
29
TEMA 2
El Transformador
Otro dispositivo que conocerás es el transformador, éste se encuentra inserto en todas
partes donde se requiere de una adaptación del voltaje o tensión. A modo de asociar su
utilidad, podemos decir, que es de uso habitual cuando cargas tu equipo celular, o usas
algún eliminador de pilas para poner en
funcionamiento un discman.
El transformador eléctrico es un
dispositivo estático que modifica los
valores de la tensión e intensidad
manteniendo la potencia (existe un
mínimo de perdidas de potencias
asociadas a la transmisión).
Los
transformadores y los motores reciben potencia
eléctrica, pero mientras el motor entrega potencia
mecánica, el transformador entrega potencia eléctrica.
Los transformadores y los generadores entregan
potencia eléctrica, el generador recibe potencia
mecánica el transformador recibe potencia eléctrica.
Partes de un transformador.
a. Circuito magnético.
b. Bobinado primario. ( Que es el que se conecta a la
red).(V1 e I1).
c.
Bobinado secundario(el que va conectado a la
carga o consumo). (V2 e I2).
El circuito magnético está
formado por núcleos que
se constituyen de chapas
delgadas de acero
laminado con alto
porcentaje de silicio
conocido como fierro
silicoso, que reúne
mejores características en lo que a calidad magnética
se refiere. Los bobinados primario y secundario del
transformador están confeccionados de alambre de
cobre aislado formando bobinas que pueden
combinarse entre sí que van instaladas en los núcleos. Todo el conjunto esta aislado y
generalmente solo se puede ver los terminales de conexión.
Mantenimiento y operación de equipos electrónicos de potencia
30
Funcionamiento del transformador.
En su forma elemental es una de las máquinas más económicas y simple, puesto que se
necesita disponer de sólo dos bobinas.
La bobina primaria es la que recibe la energía eléctrica desde un generador o una fuente
de corriente alterna y la bobina secundaria entrega esta energía al equipo que esta como
carga, este puede ser un grupo de
resistencias, un motor eléctrico, etc. Entre
estas bobinas no hay contacto eléctrico
directo y la transferencia de energía
eléctrica de una bobina a otra se hace por
medio de un campo magnético alterno.
El bobinado primario al ser recorrido por
una corriente alterna produce un campo
magnético alterno, en la bobina del
secundario al quedar sometida a éste
campo variable se induce un voltaje en sus
terminales que pasa a ser el voltaje
secundario.
El transformador elevara o reducirá el nivel de voltaje del secundario, esta relación entre
los niveles de voltaje se llama razón de transformación y esta directamente relacionada
con las características constructivas del
transformador, de las cuales se puede
rescatar la cantidad de vueltas de los
bobinados (N) y la sección de éstos.
Un transformador que fue diseñado con una
razón de transformación de dos es a uno es
un transformador reductor de tensión, ahora
si conecta la tensión de la red en el
secundario pasa a ser un elevador de
tensión.
Por ejemplo un transformador de 220/ 110 Volt , 1 KVA, corresponde a un transformador
reductor. En los transformadores se distingue las siguientes características nominales:
Mantenimiento y operación de equipos electrónicos de potencia
31
Potencia del transformador.
Que corresponde al producto de la Tensión, por la Corriente RMS de alimentación al
sistema. Cuando hablamos de potencia en un transformador, hablamos de su potencia
aparente y no de su potencia activa, ya que esta última, está condicionada por el factor de
potencia de la carga, por lo tanto la potencia de un transformador se mide en la unidad de
VA. Sin embargo, si por casualidad nos llegamos a encontrar con un transformador en el
cual la potencia es expresada en WATTS, asumiremos que esta pensado para un factor
de potencia unitario, lo cual traerá como consecuencia el asumir que S=P.
Razón de transformación.
Este importante parámetro, está relacionado con la Tensión y corriente del primario y
Tensión y corriente del secundario, se expresa a través de la siguiente expresión
V1 I1 = V2 I 2
Donde:
V1 = Voltaje primario.
I1 = Corriente primaria.
V2 = Tensión secundaria.
I2 = Corriente secundaria.
La relación de transformación, se expresa a través de la siguiente expresión:
n=
V1 I 2
=
V2 I1
Si n es mayor que 1, el transformador es REDUCTOR.
Si n es menor que 1, el transformador es ELEVADOR.
Si n es igual a 1, el transformador es AISLADOR O cumple la misión de actuar como
BUFFER.
Tipos de transformadores.
Transformadores hay muchos de diferentes tamaños y modelos tanto en distribución de
energía como industriales, domiciliarios y domésticos como el que usas en el cargador de
baterías de tú equipo celular o transformador que está en el poste de tendido publico de tu
villa donde vives.
Transformadores de potencia.
Los
transformadores
de
tensión
constante
o
transformadores
de
potencia
se
clasifican
en:
transformadores de línea y transformadores de distribución,
los primeros se emplean en líneas de transmisión de
energía en niveles voltajes altos. Los de distribución se
utilizan en la distribución de energía a las redes para el
consumo.
Mantenimiento y operación de equipos electrónicos de potencia
32
Transformadores de potencial y corriente.
Existen modelos de transformadores para muestreo
tensiones y corrientes, lo llamados transformadores de
medida. Los hay de potencial y corriente.
Son
generalmente
de razones de
transformación
alta, por
ejemplo,
1000/5 pero
muy exactos,
ya que la
muestra obtenida de tensión se utilizará en
equipos de protección y monitoreo.
Cuestionario.
1. Dibuje en sincronía, la tensión de entrada y salida de un transformador, reductor 220V
/ 12V , 50 Hz. Recuerde que los valores anteriormente indicados, corresponden a
valores RMS.
2. Determine la relación de transformación de un transformador, conectado a la red
pública que entrega 70V.
3. Un transformador, presenta una relación de transformación, n=2.5 y su tensión
máxima en el primario es de 155V. Determine: Tensión RMS del primario, Tensión
máxima del secundario, Tensión RMS del secundario y corriente RMS, para una carga
de 56 ohm.
4. Una fuente de poder, requiere para funcionar de manera óptima una corriente de 2 A y
una tensión de alimentación de 15V. Determine la potencia por la que se deberá
dimensionar como mínimo el transformador a utilizar en dicho diseño.
5. Investigue la tensión típica, que se requiere para producir una chispa en la bujía de un
motor de combustión interna.
Mantenimiento y operación de equipos electrónicos de potencia
33
TEMA 3
Tipos de Cargas y Rectificación Polifásica
En nuestras vidas cotidianas, estamos rodeados de diversa tecnología electrónica en la
cual se ve directamente involucrado el proceso de conversión de la corriente alterna, que
alimenta nuestros hogares y lugares de trabajo, a una conversión a corriente continua.
Dicho proceso, recibe el nombre de rectificación. Antes de abarcar este punto,
estudiaremos brevemente una serie de problemas producidos por la ciencia que hemos
decidido estudiar, la electrónica, para ello, comenzaremos clasificando los tipos de cargas
conectados al sistema eléctrico, las cuales nos permitirán entender algunos tipos de
problemas habituales que debemos tratar en lo posible de habitar y en algunos casos
lidiar con ellos, debido a la condición esporádica con la que aparece.
LAS CARGAS LINEALES Y NO LINEALES
Carga lineal: una carga se dice lineal cuando la corriente que ella absorbe tiene la
misma forma que la tensión que la alimenta. Esta corriente
no tiene componentes armónicos. Para estudiar las
características de los sistemas eléctricos es usual
considerarlos como resultado de la interconexión de
diferentes bloques básicos:
d) La fuente de alimentación, usualmente un voltaje
sinusoidal.
b) El consumo, usualmente constituido por resistencias,
inductancias y condensadores de valores fijos.
Ejemplo: Las resistencias de calefactores, cargas inductivas de régimen establecidos,
tales como motores o transformadores. Así, cuando el consumo es un calefactor eléctrico
de 1000 W y el voltaje es 220 V efectivos, el voltaje y la corriente tendrán la forma de la
Figura 1. Si el consumo es un motor de 1/6 HP, rendimiento 80%, factor de potencia
0,85, el voltaje y la corriente tendrán la forma de la Figura 2.
Mantenimiento y operación de equipos electrónicos de potencia
34
Mantenimiento y operación de equipos electrónicos de potencia
35
Carga no lineal o deformante: Una carga se dice “no lineal” cuando la corriente que
ella absorbe no es de la misma forma que la tensión que la alimenta. Esta corriente
es rica en componentes armónicos donde su espectro será función de la naturaleza de
carga.
Ejemplo: Fuentes de alimentación de computadoras, motores de arranque, el entrehierro
de un transformador, cargadores de batería, variadores de frecuencia, etc.
Los circuitos eléctricos y electrónicos con los que nos podemos encontrar en terreno son
variados. No podemos limitarnos solamente, a pensar en que la presencia de armónicas
lo hacen circuitos tan sencillos como rectificadores. Ahora bien, debido a la experiencia
de los profesionales del área eléctrica, es posible resumir este tipo de circuitos, los cuales
se estudiarán en más detalle a medida que avance el módulo.
La electrónica de potencia puso a disposición de los hogares y las empresas productivas
diversos equipos capaces de controlar el producto final: iluminación variable, velocidad
ajustable, etc. Así, aproximadamente un 50% de la energía eléctrica pasa por un
dispositivo de electrónica de potencia antes que ésta sea finalmente aprovechada.
La electrónica de potencia hace uso de diodos, transistores y tiristores, y prácticamente
todos ellos trabajan en el modo de interrupción
(«switching»).
Esto
significa
que
trabajan
esencialmente en 2 estados:
a) Estado de conducción.
Corresponde a un interruptor cerrado. La corriente
por el dispositivo puede alcanzar valores
elevados, pero el voltaje es nulo y, por tanto, la
disipación de potencia en él es muy pequeña.
b) Estado de bloqueo.
Corresponde a un interruptor abierto. La corriente
por el dispositivo es muy pequeña y el voltaje es
elevado; así, la disipación de potencia en el
dispositivo es también pequeña en este estado.
Todos los semiconductores de potencia pasan
rápidamente de un estado a otro, mediante circuitos
que consumen usualmente menos de 5 W se realiza
el control de estos dispositivos.
Mantenimiento y operación de equipos electrónicos de potencia
36
La Figura 3 muestra un dispositivo
para controlar la corriente en un
consumo lineal constituido por una
inductancia y una resistencia. El
voltaje es interrumpido por los
semiconductores y deja de ser
sinusoidal; la corriente es nula en
determinados intervalos de tiempo.
El usuario puede controlar los
instantes de conducción y por
tanto variar el voltaje y la corriente.
Al resultar corrientes no sinusoidales se habla de distorsión armónica y de
consumos no-lineales.
Mantenimiento y operación de equipos electrónicos de potencia
37
RECTIFICACIÓN POLIFÁSICA
Como ya sabemos, rectificar, es convertir una tensión alterna en una tensión continua.
Ahora bien, sin necesidad de volver a hacer mención al principio de funcionamiento que
tiene un diodo semiconductor, lo cual fue visto en un curso anterior, nos remitiremos
ahora dar a conocer algunas características técnicas que debemos identificar al momento
de realizar la selectividad de un diodo de potencia.
Características en Polarización Inversa:
Tensión inversa de trabajo, VRWM : Máxima tensión inversa que puede soportar de
forma continuada sin peligro de avalancha.
Tensión inversa de pico repetitivo, VRRM : Máxima tensión inversa que puede soportar
por tiempo indefinido si la duración del pico es inferior a 1ms y su frecuencia de repetición
inferior a 100 Hz.
Tensión inversa de pico único, VRSM : Máxima tensión inversa que puede soportar por
una sola vez cada 10 ó más minutos si la duración del pico.
Tensión de ruptura, VBD : Valor de la tensión capaz de provocar la avalancha aunque
solo se aplique una vez por un tiempo superior a 10ms.
Características en Polarización Directa:
Corriente media nominal, IFW(AV) : Valor medio de la máxima corriente de pulsos
senoidales que es capaz de soportar el dispositivo en forma continuada con la cápsula
mantenida a una determinada temperatura (típicamente 100º C).
Corriente de pico repetitivo, IFRM : Corriente máxima que puede ser soportada cada
20ms con duración de pico 1ms.
Corriente de pico único, IFSM : Corriente máxima que puede ser soportada por una sola
vez cada 10 ó más minutos siempre que la duración del pico sea inferior a 10ms.
Características de tensión y corriente en el diodo durante la conmutación:
Tensión directa, VON. Caída de tensión del diodo en régimen permanente para
Tensión de recuperación directa, Vfr. Tensión máxima durante el encendido.
Tiempo de recuperación directa, tON. Tiempo para alcanzar el 110% de VON.
Tiempo de subida, tr. Tiempo en el que la corriente pasa del 10% al 90% de su valor
directo nominal. Suele estar controlado por el circuito externo
Mantenimiento y operación de equipos electrónicos de potencia
38
Tiempo de recuperación inversa, trr. Tiempo que durante el apagado del diodo, tarda la
intensidad en alcanzar su valor máximo (negativo) y retornar hasta un 25% de dicho valor
máximo. (Tip. 10 µs para los diodos normales y 1uS para los diodos rápidos (corrientes
muy altas).
Luego de hacer mención a las características que se deben tener en cuenta, al momento
de llevar a cabo la selectividad de un diodo, es necesario hacer mención a algunas
utilidades prácticas que este tiene, por lo cual nos centraremos en la rectificación. A
continuación se exponen los circuitos rectificadores mas utilizados a nivel industrial.
TIPO DE RECTIFICADOR
ECUACIONES ASOCIADAS
Monofásico de media onda
Vdc=
V max
π
Recordar que en este tipo de
rectificador existe una parte del
período en el cual la tensión es cero.
Monofásico de onda completa
Vdc=
2V max
π
Este tipo de rectificador tiene como
inconveniente el uso de cuatro
diodos. Sin embargo, tenemos la
posibilidad de poder encontrar este
puente rectificador en una sola
cápsula, situación que trae consigo
el beneficio de mejorar las
condiciones de ventilación.
Mantenimiento y operación de equipos electrónicos de potencia
39
Polifásico de Media onda
1
π
sen( ) q = Número de fases del sistema
q
π
π
1
Idc
= Im ax sen( ) I DIODO =
π
q
q
Vdc ( Media Onda) = V max
IcTOTAL
En este tipo de
rectificación, se debe
tener en cuenta que
en cada período
conducirán “q”
diodos.
Rectificador trifásico de onda completa
Vdc =
3 3
V max
π
NOTA: En el caso de cargas inductivas (altamente inductivas), las
formas de onda de corriente, se ven alteradas, debido a que cada
inductor es un filtro, por lo tanto, más continua será la corriente.
Mantenimiento y operación de equipos electrónicos de potencia
40
Luego de haber estudiado los diversos circuitos rectificadores utilizados en los sistemas
electrónicos de potencia, se expone a continuación el análisis armónico de un circuito
rectificador que representa el sistema de frenado de un motor monofásico de inducción,
para ello, se determina del siguiente circuito, la tensión y corriente en la carga (comprende
la tensión total en el conjunto RL), de un simulador, y luego obtener su respectivo análisis
de espectro en tensión y corriente, con el fin de poder determinar a partir de éste el factor
de potencia.(considere f=50 Hz).cabe destacar, que el procedimiento empleado
anteriormente, corresponde a un procedimiento que es ejecutado por un instrumento,
denominado ANALIZADOR DE ESPECTROS.
De circuito anterior, utilizando Versión demo, del simulador, Electronics Workbench 8.0, se obtiene
la tensión en la carga, resultando:
Mantenimiento y operación de equipos electrónicos de potencia
41
Análisis espectral de tensión
DC component: 48.7386
No. Harmonics: 9, THD: 53.7725 %, Gridsize: 256, Interpolation Degree: 1
Harmonic Frequency Magnitude Phase
Norm. Mag Norm. Phase
-------- --------- --------- ------------- ----------1
50
91.1067
8.70978
1
0
2
100
40.94
-102.44
0.449363 -111.15
3
150
12.454
31.4527
0.136697 22.7429
4
200
10.4706
178.95
0.114927 170.24
5
250
4.72941
-3.4233
0.0519107 -12.133
6
300
12.4665
121.947
0.136834 113.238
7
350
8.47393
-171.4
0.0930111 -180.11
8
400
6.30991
133.593
0.0692585 124.883
9
450
13.0321
177.765
0.143042 169.055
Análisis espectral de Corriente.
DC component: 2.36424
No. Harmonics: 9, THD: 33.1999 %, Gridsize: 256, Interpolation Degree: 1
Harmonic Frequency Magnitude Phase
Norm. Mag Norm. Phase
-------- --------- --------- ------------- ----------1
50
3.49401
-32.585
1
0
2
100
1.11827
-161.3
0.320054 -128.72
3
150
0.212275 -49.279
0.0607539 -16.694
4
200
0.155914 116.586
0.0446233 149.171
5
250
0.0594115 -118.25
0.0170038 -85.663
6
300
0.0915878 53.6449
0.0262128 86.2299
7
350
0.07386
127.523
0.021139 160.108
8
400
0.0327851 73.6539
0.00938323 106.239
9
450
0.0852811 107.202
0.0244078 139.787
Mantenimiento y operación de equipos electrónicos de potencia
42
Del resultado del análisis espectral, es posible ahora, llevar a cabo su interpretación:
•
Idc= 2.36 A
•
I 1 (Corriente rms del primer armónico)=
•
Distorsión armónica Global o total (THD)= 33.19%, o sea el valor eficaz de los
armónicos es el 33.19% de la amplitud fundamental.
•
Ángulo de retraso = -32.585 º , (observar que es en retraso), que corresponde al
ángulo de desfase entre la tensión y la corriente.
•
Factor de desfasaje = FD = cos(-32.585)= , (en retraso).
•
Luego el factor de potencia, considerando la distorsión, resulta:
3.47
2
FP =
1
1 + THD 2
× cos ϕ 1 =
1
1 + (0.3382) 2
= 2.453A
× 0.841 = 0.79
El cual es un valor relativamente alto, debido a la componente continua que existe en su
composición.
Acitividad
1. ¿Cual es la diferencia entre una armónica y la distorsión armónica?.
2. Si la frecuencia fundamental de un sistema eléctrico es de 65 Hz, ¿Cuanto vale su
posible tercer armónico?.
3. Dibuje el diagrama de espectros producidos por una señal sinusoidal, de frecuencia
1Khz, hasta el cuarto armónico, la amplitud de la frecuencia fundamental es de 24V.
4. Mencione 3 cargas lineales y 3 cargas no lineales.
5. A partir del uso de un manual técnico, determine los parámetros importantes
mencionados del diodo 1N4007.
6. Determine el valor de tensión continua que será posible obtener a partir del uso de
una configuración de rectificación monofásica de media onda, si la fuente de
alimentación entrega 24 V (RMS).
7. Determine el valor de la fuente de alimentación, que produce la salida de un
rectificador de onda completa monofásico, que entrega una tensión de 13.5V. Dibuje
además el circuito, al cual se hace mención indicando todas sus magnitudes con su
respectivo valor.
8. Diseñe por completo un circuito rectificador trifásico, de media onda, del cual se utiliza
la red de alimentación de nuestra ciudad. Como en cualquier circuito encargado a
diseñar, Ud. Debe considerar en lo solicitado, la muestra del diagrama o
representación circuital, magnitudes respectivas y selectividad justificada del conjunto
rectificador.
9. En una instalación eléctrica en la cual se caracteriza el uso de alrededor de 35
computadoras y además 4 impresoras láser, se desea investigar si los filtros
armónicos funcionan adecuadamente. Para ello, se hace un análisis de la calidad de la
energía eléctrica, a través del uso de un analizador de espectros, el cual arroja los
siguientes resultados en tensión.
Mantenimiento y operación de equipos electrónicos de potencia
43
DC component: -0.002185
No. Harmonics: 6, THD: 0.00852907 %, Gridsize: 256, Interpolation Degree: 1
Harmonic Frequency
Magnitude
Phase
-------- --------- --------- ------------- ----------1
60
109.93
-0.0014653
2
120
0.00423431
57.2189
3
180
0.00425102
129.61
4
240
0.0042634
-154.64
5
300
0.00418132
-82.784
6
360
0.00403102
-10.856
A partir de ello, determine:
a)
b)
c)
d)
e)
f)
Valor de la componente continua.
Distorsión armónica total. ¿Es alta o baja? ¿Qué significa su valor?.
Amplitud y Frecuencia de la señal fundamental.
Amplitud y Frecuencia del cuarto armónico.
Diagrama de espectros hasta el tercer armónico.
Ángulo de desfase del tercer armónico.
Mantenimiento y operación de equipos electrónicos de potencia
44
TEMA 4
EL TRANSISTOR BIPOLAR
OBJETIVOS
•
•
•
Conocer las Características técnicas y mecánicas que se deben tener en cuenta al
momento de escoger un transistor para ser utilizado en Técnicas de electrónica de
potencia.
Lograr describir el Funcionamiento de un transistor en conmutación.
Entender precauciones técnicas que implican el uso de estos con cargas inductivas.
Transistores Bipolares
El transistor bipolar de uniones, conocido también por BJT (siglas de su denominación
inglesa Bipo- lar Junction Transistor), es un dispositivo de tres terminales denominados
emisor, base y colector. La propiedad más destacada de este dispositivo es que aproxima
una fuente dependiente de corriente: dentro de ciertos márgenes, la corriente en el
terminal de colector es controlada por la corriente en el terminal de base. La mayoría de
funciones electrónicas se realizan con circuitos que emplean transistores, sean bipolares
o de efecto de campo, los cuales se estudiarán mas adelante. Ambos transistores son,
por tanto, los dispositivos básicos de la electrónica moderna. En este capítulo se
presentará el comportamiento del transistor bipolar en uso como interruptor.
Los símbolos que
corresponden a este tipo
de transistor son los
siguientes:
Transistor NPN
Estructura de un
transistor NPN
Transistor
PNP
Estructura de un
transistor PNP
En la siguiente imagen, se muestra un gráfico resumen que indica las respectivas zonas
de trabajo del transistor, de las cuales se desprenden mas adelante las respectivas
ecuaciones o valores de tensión o corriente válidos para cada zona.
Mantenimiento y operación de equipos electrónicos de potencia
45
Zona de corte
Zona Activa
Zona de Saturación
Vce ≈ 0
Vce ≈ Vcc ≈ V fuente
Ic ≈ 0
0 < Vce < Vcc
Vcc − Vbe
Ib =
Rb
Ic = β × I b
Ib =
Vb − Vbe
Vcc
Ic =
Rb
Rc
Vb=Vcc, si es alimentado por la
misma fuente de alimentación.
En esta zona, debemos ser
cuidadosos de no excedernos
en el valor de la corriente de
base (Ib), ya que si la seguimos
aumentando, podemos quemar
el transistor.
Un transistor funciona como un interruptor para el circuito conectado al colector (Rc) si se
hace pasar rápidamente de corte a saturación y viceversa. En corte es un interruptor
abierto y en saturación es un interruptor cerrado. Los datos para calcular un circuito de
transistor como interruptor son: el voltaje del circuito que se va a encender y la corriente
que requiere con ese voltaje. El voltaje Vcc se hace igual al voltaje nominal del circuito, y
la corriente corresponde a la corriente Icsat. Se calcula la corriente de saturación mínima,
luego la resistencia de base mínima a través de las siguientes expresiones:
IBSAT min = Icsat / β
RBMax = Von/IBsat min
NOTA: Estas expresiones, sólo deben utilizarse para efectos de
diseño, en las zonas de corte y saturación, ya que en condiciones
dinámicas, puede verse involucrado otro estado del transistor (zona
activa).
Mantenimiento y operación de equipos electrónicos de potencia
46
Donde:
Von es el voltaje en la resistencia de base para encender el circuito, el circuito debe
usar una RB por lo menos 4 veces menor que RBmax.
Adicionalmente se debe asegurar un voltaje en RB de apagado Voff que haga que el
circuito entre en corte. En la siguiente imagen, se indica un resumen de los circuitos mas
comunes que permiten utilizar el transistor en las zonas de corte y saturación.
La principal aplicación de transistor como interruptor es en los circuitos e integrados
lógicos, allí se mantienen trabajando los transistores entre corte o en saturación, en otro
campo se aplican para activar y desactivar relés, en este caso como la carga es inductiva
(bobina del relé) al pasar el transistor de saturación a corte se presenta la "patada
inductiva" que al ser repetitiva quema el transistor, es por ello, que se debe hacer una
protección con un diodo en una aplicación llamada diodo volante. Otra aplicación práctica,
corresponde a la modulación por anchura de impulsos PWM, la cual será punto de
análisis en esta unidad.
Ahora bien, debemos ser precavidos ya que este dispositivo será sometido a tensiones y
corrientes altas, lo cual nos condiciona el tipo de encapsulado que estos tienen, ya que
están pensados en su construcción para disipar calor. A continuación, se exponen
algunos de ellos, que corresponden a los más comunes encontrados en los diversos
equipos de electrónica de potencia.
Mantenimiento y operación de equipos electrónicos de potencia
47
Cápsula TO-3. Se utiliza para transistores de
gran potencia, que siempre suelen llevar un
radiador de aluminio que ayuda a disipar la
potencia que se genera en él.
Arriba a la izquierda vemos su distribución de
terminales, observando que el colector es el
chasis del transistor. Nótese que los otros
terminales no están a la misma distancia de los
dos agujeros.
A
la
derecha
vemos la
forma de
colocarlo
sobre un
radiador,
con sus tornillos y la mica aislante. La función de la
mica es la de aislante eléctrico y a la vez conductor
térmico. De esta forma, el colector del transistor no
está en contacto eléctrico con el radiador.
Cápsula TO-220. Se utiliza para
transistores de menos potencia, para
reguladores de tensión en fuentes de
alimentación y para tiristores y triacs de
baja potencia. Generalmente necesitan
un radiador de aluminio, aunque a veces
no es necesario, si la potencia que van a
disipar es reducida. Abajo vemos la
forma de colocarle el radiador y el
tornillo de sujeción. Se suele colocar una
mica aislante entre el transistor y el
radiador, así como un separador de
plástico para el tornillo, ya que la parte
metálica está conectada al terminal
central y a veces no interesa que entre
en contacto eléctrico con el radiador.
Mantenimiento y operación de equipos electrónicos de potencia
48
Cápsula TO-126. Se utiliza en
transistores de potencia reducida, a los
que no resulta generalmente necesario
colocarles radiador. Arriba a la izquierda
vemos la asignación de terminales de
un transistor BJT y de un Tiristor. Abajo
vemos dos transistores que tienen esta
cápsula colocados sobre pequeños
radiadores de aluminio y fijados con su
tornillo correspondiente.
Nota: Para efectos prácticos, se debe mencionar que en cada manual de fabricante de
cada transistor o cualquier dispositivo electrónico, se indica si es necesario instalar un
disipador, después de una determinada corriente.
Ejemplos de Cálculo.
1. Calcular las corrientes
de emisor, base y
colector en el circuito
que a continuación se
muestra, suponiendo
que el transistor se
comporta según la
zona activa, y tiene un
comportamiento
idéntico al real,
correspondiente aun
diodo de silicio.
Considerar VBB =VCC=10 V; RB = 100 kΩ; RC = 500 Ω; βF = 100.
Demuestre además que el transistor se encuentra en la zona activa.
Desarrollo:
Vcc=Vbb=10V
Rb=100K ohm
Rc=500 ohm
Bf=100
Vbe=0.7
Vcc − Vbe 10 − 0.7
=
= 93µA
Rb
100 K
Ic = β × I b = 100 × 93µ = 9.3mA
Ib =
Ie ⇒ L.K .C ∴ Ie = Ic + Ib = 93µA + 9.3mA = 9.3093mA
Para demostrar que el transistor se encuentra en la zona activa, se debe cumplir que :
Mantenimiento y operación de equipos electrónicos de potencia
49
0 < Vce < Vcc
O sea:
0V < Vce < 10V
Para obtener el Vce, se puede recurrir directamente a la medición de tensión entre el
colector y el emisor. Sin embargo, podemos determinarlo a través del uso de L.K.V..
Resultando lo siguiente:
− Vcc + IcRc + Vce = 0
⇒ Vce = Vcc − IcRc = 10 − (9.3m × 500)
Vce = 5.35V
Si interpretamos el resultado, de Vce, podemos
decir de acuerdo al criterio, que el transistor se
encuentra trabajando en la zona activa.
& Desarrolle los siguientes ejercicios y conteste las siguientes preguntas.
1. Determine el resistor
de Base a utilizar, con
el fin de emplear un
transistor NPN, en la
zona de
Corte y
Saturación,
configurado en emisor
común, el cual tiene
un
factor
de
amplificación
de
corriente 150 y la
carga corresponde a
una
lámpara
que
puede funcionar a una
tensión variable entre 12V y 16V, que consume una corriente máxima de
500mA.(Resp: Con Von=15V, Rb=1.13Kohm)
2. Diseñe por completo un circuito que permita controlar un relé, comandado por un
transistor, operado en la zona de corte y saturación, el cual tiene un factor de
amplificacion de corriente 100. El relé a comandar, corresponde a un relé del tipo
SPTD, con bobina de 12V@100mA, y contactos de 10A, los cuales arrancarán un
ventilador alimentado a una tensión de 220V con un consumo máximo de 1A. Para tal
diseño, determine los valores de RB y las respectivas consideraciones prácticas,
frente a una carga de estas características.
Mantenimiento y operación de equipos electrónicos de potencia
50
3. Analice el siguiente circuito y determine lo siguiente:
a) Corriente de Base y
Colector, considerando
Vbe=0.6V, con A=1
(resp. 19.4mA )
b) Estado que debe
adoptar el Switch A, de
modo que la lámpara
se encienda.(resp. A=0,
Vce=20V)
NOTA: La lámpara se
encenderá si y solo si,
se encontrase sometida
a 12 V como Mínimo.
Además, considere que
esta
tiene
una
resistencia eléctrica en
condiciones de funcionamiento de 100K ohm.
4. Investigue a través de manuales técnicos, los siguientes parámetros del Transistor
modelo TIP31C.
Parámetro
Ic Máx
Hfe o B (Beta)
Vce Max
Ib Max
Ancho de Banda
Magnitud
5. Determine la corriente de base del siguiente circuito, considerando que el transistor
que se modela, corresponde a
un dispositivo del tipo TIP31C
y éste se encuentra en
funcionamiento en la zona
activa.
Mantenimiento y operación de equipos electrónicos de potencia
51
6. Del circuito que se presenta a continuación, explique brevemente si es posible o no
que la lámpara se encienda.
8. Del modelo que se indica a continuación, llene la siguiente tabla con los datos que se
piden.
Datos
Se requiere
Ib=0
Vce=
Vce=0
Zona de Trabajo=
Vce=15V y Vcc=14.5V
Zona de Trabajo=
Ib=1mA, Beta=500, Ic= 1 A
Zona de Trabajo=
Ib=0
Zona de Trabajo=
Ib=2mA , Beta=100, Ic= 200mA
Zona de Trabajo=
Beta=200, Ic=5 A, Zona Activa
Ib=
9. Investigar que es el efecto Early.
10. Investigar nuevas técnicas de ventilación para semiconductores, en especial para
microprocesadores. Se sugiere visitar el sitio web de “Electronics Cooling”.
11. Presente un diseño, a libre elección, el cual se proyecte a ser montado en el
laboratorio, en el cual se utilice un transistor en la zona de corte o saturación.
Mantenimiento y operación de equipos electrónicos de potencia
52
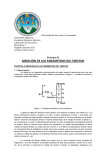
TEMA 5
CONFIGURACIÓN DARLINGTON
El transistor Darlington es un tipo especial de transistor que tiene una alta ganancia de
corriente.
Está compuesto internamente por dos transistores bipolares que se conectan es
cascada.
Ver la forma en la figura.
El transistor T1 entrega la corriente que sale por su emisor a la base del transistor T2.
La ecuación de ganancia de un transistor típico es: IE=
x IB (Corriente de colector es
igual a beta por la corriente de base).
Entonces analizando el gráfico:
Ecuación del primer transistor es: IE1 = 1 x IB1 (1),
Ecuación del segundo transistor es: IE2 = 2 x IB2 (2)
Observando el gráfico, la corriente de emisor del transistor (T1) es la misma que la
corriente de base del transistor T2. Entonces IE1 = IB2 (3)
Entonces utilizando la ecuación (2) y la ecuación (3) se obtiene:
IE2 = 2 x IB2 = 2 x IE1
Reemplazando en la ecuación anterior el valor de IE1 (ver ecuación (1) ) se obtiene la
ecuación final de ganancia del transistor Darlington.
Mantenimiento y operación de equipos electrónicos de potencia
53
IE2 = 2 x 1 x IB1
Como se puede deducir, este amplificador tiene una ganancia mucho mayor que la de un
transistor corriente, pues aprovecha la ganancia de los dos transistores. ( la ganancias se
multiplican).
Si se tuvieran dos transistores con ganancia 100 (b = 100) conectados como un transistor
Darlington y se utilizara la formula anterior, la ganancia sería, en teoría:
2 x 1 = 100 x 100 = 10000.
Como se ve es una ganancia muy grande. En la realidad la ganancia es menor.
Se utilizan ampliamente en circuitos en donde es necesario controlar cargas grandes con
corrientes muy pequeñas.
Muy importante: la caída de tensión entre la base y el emisor del transistor Darlington es
1.4 voltios que resulta de la suma de las caídas de tensión de base a emisor del primer
transistor B1 a E1 (0.7 voltios) y base a emisor del segundo transistor B2 y E2 (0.7
voltios).
Esta configuración sirve para que el dispositivo sea capaz de proporcionar una gran
ganancia de corriente (parámetro
del transistor) y, al poder estar todo integrado,
requiere menos espacio que dos transistores normales en la misma configuración. La
ganancia total del Darlington es el producto de la ganancia de los transistores
individuales. Un dispositivo típico tiene una ganancia en corriente de 1000 o superior.
También tiene un mayor desplazamiento de fase en altas frecuencias que un único
transistor, de ahí que pueda convertirse fácilmente en inestable. La tensión base-emisor
también es mayor, siendo la suma de ambas tensiones base-emisor, y para transistores
de silicio es superior a 1.2V.
Mantenimiento y operación de equipos electrónicos de potencia
54
Aplicaciones Practicas del Transistor Darlington
Mando de un motor DC
Cuando el pulsador permanece sin accionar la tensión en la base del
Darlington es cero y por lo tanto está en corte, no circulan corrientes y el
motor permanece parado.
Si se acciona el pulsador, la tensión en la base aumenta y se pasa a
saturación, en este momento, el Darlington permite el paso de corriente y el
motor se pone en marcha.
Como la ganancia de corriente es de 1000 aproximadamente, si se hace
circular una corriente de 1 mA por la base por el colector circulará una
corriente de 1000 mA es decir de un Amperio.
La resistencia R1 limita la corriente que entra por la base.
Por otra parte la caída de tensión entre la base y el emisor del Darlington se
corresponde con la caída de tensión en dos diodos de silicio en polarización
directa, es decir 1,4 V.
El diodo en paralelo con el motor protege al Darlington del pico de corriente
que produce el bobinado del motor en el mismo momento en el que el
Darlington pasa de saturación a corte debido a la fuerza
contraelectromotriz.
Mantenimiento y operación de equipos electrónicos de potencia
55
Arreglo Darlington comercial
Existen diversas maneras de utilizar un transistor para poder comandar una carga.
Sin embargo, nos remitiremos a presentar una versión ampliada que dispone de 7
salidas, las cuales se encuentran en el interior de una sola cápsula. La estructura
de este dispositivo se muestra a continuación.
Así mismo las entradas TTL deben ser alimentadas con una tensión máxima de 5
V o de lo contrario el chip resultará dañado.
Las 7 salidas de potencia no son mas que la amplificación mediante un array de
transistores Darlington (ULN2003) de las salidas TTL 0 a 6 (la salida 7 no es
usada). Este chip puede drenar una corriente máxima de 500 ma, lo que es
suficiente para activar un LED, un relé y hasta un motor DC de bajo consumo (tipo
motor de grabador).
La imagen que a continuación se muestra, expone la estructura interna de este Circuito
integrado.
Mantenimiento y operación de equipos electrónicos de potencia
56
Mantenimiento y operación de equipos electrónicos de potencia
57
Mantenimiento y operación de equipos electrónicos de potencia
58
Mantenimiento y operación de equipos electrónicos de potencia
59
& Cuestionario Final
1. Cual es la diferencia entre un transistor Darlington y un transistor normal?.
2. Que nombre recibe la conexión presente en la configuración Darlington?
3. Escriba la ecuación que permite calcular la corriente que circula por el Emisor
de un transistor Darlington.
4. Un transistor con una ganancia de 100 y otro con una ganancia de 75, se
conectan en cascada, permitiendo la circulación de una corriente de 5 mA por
su base. A partir de ello, determine la ganancia total de la configuración y la
corriente que circula en el emisor y en el colector de dicho arreglo.
5. Mencione el valor aproximado de la caída de tensión producida por el transistor
darlington en sus emisores.
6. Un circuito del tipo IC555, genera pulsos con amplitudes de 7V en alto y 0 en
bajo. Dicho circuito es utilizado para comandar un motor de un ventilador el
cual funciona de manera intermitente, por lo tanto, se pide presentar de manera
aproximada el bosquejo necesario para satisfacer dicho requerimiento.
7. Mencione las características técnicas mas importantes del dispositivo
ULN2003.
8. Plantee un diseño a libre elección en el cual se utilice un transistor del tipo
Darlington.
Mantenimiento y operación de equipos electrónicos de potencia
60
TEMA 6
REGULADORES DE TENSIÓN
Regulador De Tensión Integrado LM317
En el ámbito de la electrónica, a diario nos encontramos en forma
cotidiana con la necesidad de tener un sistema de alimentación
eléctrica, que sea lo mas exacta y estable, existiendo diversos
circuitos y configuraciones que nos ofrecen alternativas, que
satisfacen dicha situación. A continuación estudiaremos un
circuito integrado que recibe un nivel de tensión por su entrada y
lo entrega regulado por su salida, de acuerdo al ajuste que recibe
por el pin de ajuste, que consiste en el uso de un potenciómetro o
resistor fijo, de acuerdo a la condición de diseño, que altera la
referencia y actúa de acuerdo a su ecuación de control. Es
ampliamente utilizado en fuentes de voltaje de buena calidad.
Aunque la referencia mencionada se usa para voltajes positivos,
existiendo para voltajes negativos existe su homólogo con la
referencia LM337.
A continuación se describen las configuraciones mas utilizadas
a)
Regulador de tensión Básico
Este circuito entrega una salida de voltaje que
depende de las resistencias R1 y R2. C1 se
requiere sólo si el rectificador de voltaje se
encuentra distante. Su ecuación considera la
corriente que circula por el potenciómetro de
ajuste, pero debido a que en el peor de los casos,
es tan baja, será obviada para efectos de
cálculos, resultando:
Especificaciones Técnicas
Parámetro LM317T
Unidades
Vout
Vin Máx
Iout
1,2-37
40
1,5
Volt
Volt
amperes
Pot
15
Watios
Voltaje de salida ajustable entre 1,2 y 37 Volt
Protección contra sobrecargas
Protección Térmica
Se recomienda el uso de R1, con un valor
de 240ohm y un potenciómetro de 5 Kohm.
Mantenimiento y operación de equipos electrónicos de potencia
61
b)
Control digital on/off de una fuente regulada
A través del transistor podemos controlar el encendido y apagado en la salida de tensión.
Cuando se aplica un "0"a la
base, la tensión aparece en la
salida de acuerdo a la posición
del potenciómetro, pero si se
aplica un "1", el voltaje se salida
será el mínimo (1,25V), sin
importar
la
posición
del
potenciómetro. El modelo que
se presenta, esta configurado
para entregar una tensión de
5V. Sin embargo, podemos
cambiar
el
R2,
por
el
potenciómetro y lograremos
ajustar los valores de la salida
de tensión de acuerdo a la necesidad.
c)
Cargador de batería de baja corriente
Con
los
valores
que
aparecen aquí podemos
construir
fácilmente
un
elemental
cargador
de
baterías,
obviamente
siempre y cuando no supere
la barrera de los 1,5
amperes (en este caso la
batería).
Mantenimiento y operación de equipos electrónicos de potencia
62
d) Fuente conmutada de bajo costo.
La siguiente fuente de alimentación, corresponde a una fuente conmutada, la cual es de
aplicación en diversos sistemas de alimentación y sistemas electrónicos que requieran un
valor considerable de corriente de trabajo, tales como fuentes de alimentación de PC
portátiles, equipo de pruebas de radio, etc.
Mantenimiento y operación de equipos electrónicos de potencia
63
Reguladores de Tensión Alterna
Los sistemas eléctricos de edificios, están compuestos en gran parte de cargas
monofásicas que son alimentadas frecuentemente con una fuente de 4 hilos en estrella
aterrizada. Con la llegada de la computadora personal y la fuente de alimentación
conmutada a principios de los 80's un porcentaje cada vez mayor de estos tipos de
cargas son no lineales por naturaleza, es decir producen armónicas. Los
dispositivos monofásicos generalmente exhiben las siguientes armónicas de la
fundamental en la forma de onda de corriente: 3, 5, 7, 9, 11, 13, etc. (esto
incluye todas las armónicas impares) En estos tipos de aplicaciones debe tomarse en
cuenta los siguientes puntos:
1. Aún en condiciones de carga balanceada las armónicas múltiplos de tres se sumarán
en el conductor neutro. La tercera armónica es generalmente mucho mayor que el resto
y es habitualmente la más significativa.
2. Los transformadores alimentadores conectados en delta-estrella aterrada bloquearán
la mayoría de las corrientes de tercera armónica y sus múltiplos, evitando que fluyan
hacia el sistema de alta tensión. Consecuentemente, esta conexión es preferida en esta
aplicación.
3.
Debido a las corrientes de neutro potencialmente altas en esta aplicación, un
conductor neutro común puede dimensionarse tanto como al doble de los conductores de
fase o llevar neutros separados por fase.
4. Los transformadores necesitan ser dimensionados o corregidos para manejar las altas
corrientes armónicas. Esta es la aplicación principal de los transformadores clasificados
con factor K.
5. Se recomiendan interruptores de operación con rms real
6. Pueden aplicarse filtros a las cargas para reducir las armónicas a lo largo del sistema.
Esto puede reducir la clasificación de factor-K necesario del transformador, así como los
requerimientos de corriente de neutro.
Pueden emplearse transformadores en zig-zag o estrella-delta para atrapar las armónicas
de secuencia cero tales como h= 3, 6, 9, etc. Esto reducirá el trabajo en el equipo antes
del transformador.
A continuación, se describen los principales problemas eléctricos, en los cuales se ven
involucradas variaciones de tensión.
Mantenimiento y operación de equipos electrónicos de potencia
64
Mantenimiento y operación de equipos electrónicos de potencia
65
En función de lo anterior, podemos encontrar como solución Ingenieril equipos
denominados estabilizadores de tensión, los cuales están destinados a la estabilización
de las oscilaciones de la tensión de la red o del generador al nivel que asegure el
funcionamiento sin problemas de todos los equipos usados habitualmente en hogares,
oficinas, etc. (televisores, radios, vídeos, DVD, ordenadores, impresoras, copiadoras,
refrigeradores, microondas, etc.). El modelo técnico garantiza el funcionamiento sin
operador, la alta fiabilidad y la acessibilidad del precio para el círculo más amplio posible
de usuarios.Los estabilizadores se suministran en tres niveles de rendimiento que se
distinguen por la posible carga, es decir, por la suma de las potencias de todos los
equipos conectados.
Características técnicas de un Estabilizador de tensión
Datos
Potencia Equipos:
Intensidad Máxima:
Rendimiento:
Distorsión:
Frecuencia:
Tª Ambiente de Trabajo:
Humedad Ambiente:
Protección Tª Trafos:
Protección Magnetotérmica:
By-pass:
Ejemplo
Trifásico desde 6 a 250 KVA Monofásico desde 2 a
70 KVA
Según modelo.
> 98%
Ninguna
De 50 a 60 Hz
- 30ºC / +50ºC
De 0% a 97% sin condensación
Medida permanente de la temperatura de los
trafos, produciendo by-pass en caso de
calentamiento excesivo.
Independiente por fase.
Interno: Automático, NO BREAK, independiente
para cada fase. Externo: Manual y automático.
Precisión:
Mejor del 0’5%. (Escalones de estabilización de
0,7V)
Campo Regulación:
Salida de ±45 V respecto a la tensión de entrada.
Tipo Regulación:
Independiente para cada fase con diferentes
tensiones predeterminadas, pudiéndose fijar la
histéresis de 1 a 5 voltios. Todos los parámetros
pueden ser prefijados según el criterio del usuario.
Mantenimiento y operación de equipos electrónicos de potencia
66
Reguladores comerciales
Sistemas de respaldo
¿Qué es una UPS?
Una UPS es una fuente de energía ininterrumpida que permiten a una computadora o
equipo eléctrico seguir trabajando por al menos un corto tiempo cuando la fuente principal
de energía se pierde.
¿Qué significa poner en By-Pass?
El modo By-Pass, puede ser utilizado en los casos de tareas de mantenimiento, ó si la
UPS falla, ó para conmutar la carga a la línea si la tensión de salida cae por una
sobrecarga, tal como encender un equipo con una alta corriente de arranque. El By-Pass
es una ruta eléctrica alternativa para llegar a un dispositivo que permite el flujo de
energía para la carga, como un UPS.
¿Cuáles son los componentes principales de una UPS?
La sección de entrada es la forma en que la tensión de la línea es conectada a la
UPS. Puede ser un cable incorporado, un cable enchufable, o una bornera con
terminales. Algunas UPS pequeñas tienen una entrada común para la entrada y
el by-pass. Las UPS de gran potencia suelen tener una entrada independiente
para la conexión del by-pass.
Después de la sección de entrada suele haber un filtro. La denominación filtro
será aquí utilizada de modo genérico, e incluye la protección contra picos
transitorios, interferencias de radio frecuencia, etc. Un filtro tiene una respuesta
de frecuencia y no atenúa todas en la misma proporción.
Mantenimiento y operación de equipos electrónicos de potencia
67
Todas las configuraciones de UPS tienen un Inversor. Las UPS de bajo costo
poseen un inversor que entrega una salida de onda cuasi-sinusoidal, mientras
que las UPS de mayor tamaño y costo incorporan un Inversor con una forma de
onda de salida sinusoidal.
Una batería es necesaria para mantener funcionando a la UPS cuando la energía
de la línea falla o cae demasiado. Normalmente las UPS de pequeña potencia
utilizan baterías internas selladas, libres de mantenimiento. En grandes UPS se
suele usar también baterías de electrolito líquido. Una autonomía (tiempo de
reserva de energía) típica para una UPS de pequeño ó mediano tamaño, suele
ser de 10 a 15 minutos.
Un circuito cargador es necesario para recargar la batería después de un corte
de energía, y para mantener a la batería a plena carga mientras no está en uso.
En una UPS On-Line un conmutador mecánico o estático es usado como parte
del circuito automático o manual de by-pass. En una UPS Off-Line, un
conmutador mecánico (relé) es usado para conmutar la carga a la salida del
inversor cuando falla la línea de alimentación.
La sección de salida es donde se conectan las cargas a proteger por la UPS. La
cantidad y configuración de las tomas de salida varían según marcas y modelos.
En UPS de gran tamaño es común que la salida se realice por intermedio de
borneras.
La mayoría de los equipos UPS operan de manera automática, tienen una
alarma sonora indicadora de falla de línea, y un panel de control y estado de la
UPS relativamente sencillo.
En grandes UPS se incluyen medidores y un sistema de control mucho más
sofisticado.
Una UPS con un sistema de regulación de tensión de entrada (estabilizador) es
conocida como UPS Interactiva. El estabilizador de tensión es utilizado para
mantener el voltaje de entrada dentro de los límites aceptables para la carga,
cuando la tensión de la línea disminuye ó se eleva fuera de un rango
predeterminado
Mantenimiento y operación de equipos electrónicos de potencia
68
Mantenimiento y operación de equipos electrónicos de potencia
69
Mantenimiento y operación de equipos electrónicos de potencia
70
Características técnicas de un sistema de respaldo (UPS).
MODO DE ALIMENTACIÓN NORMAL (como estabilizador)
Tensión de Entrada Nominal
220 Volts
Rango de Tensión de Entrada
220 Volts c.a.- 20% + 10%
Tensión de Salida (Volts c.a.)
220 V +/- 7%
Frecuencia de Entrada Aceptada
50 Hz +/- 5%
Forma de Onda
Sinusoidal
Capacidad de Sobrecarga
300%: 1 ciclo; 150%: 1 minuto
MODO DE FUNCIONAMIENTO EN BATERÍA
Entrada como UPS
por Baja Tensión
155 Volts c.a.
Reconexión a la Red
desde baja Tensión
165 Volts c.a.
Entrada como UPS
por Alta Tensión
250 Volts c.a.
Reconexión a la Red
desde Alta Tensión
245 Volts c.a.
Tensión de Salida desde Baterías
Forma de Onda
220 Volts +/- 5%
Sinusoidal Equivalente
Frecuencia
50 Hz +/- 0,5%
Capacidad de Sobrecarga
Conmutación de Red a Batería y
Viceversa
Tiempo de Conmutación Típico
Autonomía (Minutos)
150%: 1 ciclo, con 110% luego de 5 segundos se apaga.
Sincronizado con la Red
De 3 a 5 milisegundos - Imperceptible para Computadoras
Típico 10 a 30 minutos
INDICACIONES EN EL FRENTE Y ALARMA AUDITIVA
Tensión Normal
Si
Salida desde Baterías
Si
Sobrecarga
Si
Batería en Carga
Si
Batería Baja
Si
PRESTACIONES IMPORTANTES
Arranque sin Línea
Si
Compatible con
Grupos Electrógenos
Si
Mantenimiento y operación de equipos electrónicos de potencia
71
PROTECCIONES
Con Línea Normal: Fusibles Rápidos
Sobre Batería: Límite Electrónico de Corriente
Contra Cortocircuitos y Sobrecargas
Contra Ruidos Eléctricos
Con filtro de Medias y Altas Frecuencias
Sobretensiones Transitorias
de Entrada
Varistores y Filtros RC
Contra Descarga Excesiva
de Batería
Corte de la Salida por Batería Descargda
Contra Sobretensiónes
por Línea Telefónica
Conector RJ - 11
(Protección Telefónica)
Si
Shutdown Automático
(Conector DB - 9)
Si (opcional)
BATERÍAS
Voltaje de c.c. (Volts c.c.)
36
48
72
Cargador de Baterías Interno
(Amperes)
1
2
DIMENSIONES
Alto (mm)
325
363
Ancho (mm)
145
220
Largo (mm)
450
570
21
26
Peso (Kg)
Salidas 220 Volts
4
Borneras
CONDICIONES AMBIENTALES
Temperatura de Operación:
De 0 a 40°C
Altura Sin Derating
Humedad Relativa: De 0 a 95% Sin Condensación
1000 m. Sobre el Nivel del Mar
Mantenimiento y operación de equipos electrónicos de potencia
72
& Actividad
1. Diseñe un regulador de tensión de corriente continua, que permita estabilizar
tensiones de acuerdo a las necesidades del usuario que bordean entre 1,5 V y 35V,
con una corriente máxima de 2 A.
2. ¿Dónde se justifica el uso de reguladores de tensión?
3. Describa con sus palabras cada uno de los problemas eléctricos existentes en la red
eléctrica y mencione un ejemplo típico que le permitirá identificarlo de manera práctica.
4. A partir de los datos técnicos del siguiente estabilizador de tensión, determine:
a) Factibilidad técnica para la conexión de un PC de escritorio.
b) Factibilidad técnica para la conexión de un TV plasma 300 W.
c) Factibilidad técnica para la conexión de 1 PC de escritorio y uno portátil (Notebook), al
mismo tiempo.
5.
Determine las características técnicas de un regulador de tensión necesario para
conectar 2 PC de escritorio instalados en una central de monitoreo de alarmas que
comparten además en común un ROUTER y un MODEM. Averigüe datos técnicos de
estos equipos y luego justifique el consumo de potencia en forma aproximado con el
fin de seleccionar el adecuado.
6. Considerando los datos anteriores, repita el procedimiento pero pensando en la
selectividad de una UPS, que tendrá una autonomía de 20 minutos.
Mantenimiento y operación de equipos electrónicos de potencia
73
7. A partir de los datos técnicos del siguiente regulador de tensión, determine:
Descripción
APC Back-UPS Pro, 1400VA/950W, Entrada 230V/
Salida 230V, Interface Port DB-9 RS-232
Características generales
Regulación automática de tensión, Baterías intercambiables en
funcionamiento, Manejo inteligente de la batería, Protección contra
sobretensiones para líneas de datos de red, Indicador de sobrecarga,
Corrección de sobretensión, Indicador de reemplazo de batería
Comunicaciones y manejo
Puerto de interfaz
DB-9 RS-232
Visualizador de estatus LED en línea: Batería en
actividad: batería de reemplazo e indicadores de
sobrecarga
Alarma de batería encendida: alarma distintiva de
carga de batería baja
Panel de control
Alarma audible
Software incluido
Salida
Capacidad de Potencia de Salida
Capacidad de Potencia de Salida
Tensión de salida nominal
Tipo de forma de onda
1,400 VA
950 Watts
230 V
Aproximación acompasada de una onda sinusoidal
(4)IEC 320 C13
Conexiones de salida
(2)IEC Jumpers
Entrada
Entrada de voltaje
Frecuencia de entrada
230 V
50/60 Hz +/- 3 Hz (autosensible)
IEC-320-C14 inlet
Tipo de enchufe
Variación de tensión de entrada
para operaciones principales
Proteção contra surtos e filtragem
Protección de línea de datos
Tiempo de autonomía
Duración típica de reserva
a media carga
Duración típica de reserva
con carga completa
Tabla de duración
Baterías
Tipo de batería
Tiempo típico de recarga **
Cartucho de repuesto de batería
Físico
Dimensiones de altura máxima
Dimensiones de anchura máxima
Dimensiones de profundidad máxima
Peso neto
Peso de embarque
Altura de envío
Anchura de envío
Profundidad de envío
Color
Ambiental
Ambiente operativo
Humedad relativa de operación
Elevación de operación
175 - 295 V
Protección de 10 Base-T Ethernet RJ45
23.8 minutes (475 Watts)
6.7 minutes (950 Watts)
Back-UPS Pro
Batería sellada de plomo sin necesidad de
mantención con electrolito suspendido: a prueba de
filtración
6 hora(s)
(1) RBC7
8.50 pulgadas ( 21.59 cm)
6.70 pulgadas ( 17.02 cm)
17.30 pulgadas ( 43.94 cm)
53.04 lbs ( 24.11 kg)
57.86 lbs ( 26.30 kg)
11.00 pulgadas ( 27.94 cm)
10.00 pulgadas ( 25.40 cm)
21.00 pulgadas ( 53.34 cm)
Beige
0 - 40 °C (32 - 104°F)
0 - 95%
0-10000 feet (0-3000 m)
Mantenimiento y operación de equipos electrónicos de potencia
74
Temperatura de almacenamiento
Humedad relativa de almacenamiento
Elevación de almacenamiento
Ruido audible a 1 metro de la superficie de la unidad
Disipación térmica en línea
Conformidad
Aprobaciones
Garantia Padrão
-15 - 45 °C (5 - 113°F)
0 - 95% Non-condensing
0-50000 Pies (0-15000 m)
50 dBA
84 BTU/hr
CE, TUV, VDE
Reparación o reemplazo por 2 años
a) Factibilidad técnica para ser instalada en 2 TV de 150 W cada uno.
b) Factibilidad técnica para ser instalada en Equipo transmisor de radio aficionado,
400W.
c) Factibilidad técnica para ser instalada en Equipo transmisor de Televisión, canal 15 ,
690W.
d) Costo que tiene el transporte si la empresa de transporte cobra $500 por cada Kg de
envío.
e) Cantidad de unidades embaladas que caben al interior de una camioneta de
carrocería con dimensiones 0,5m , de alto, 1m de ancho, 1,5 m de largo.
8. ¿Cual es la diferencia entre una subida de tensión y un transiente?
Mantenimiento y operación de equipos electrónicos de potencia
75
TEMA 8
SEÑALES PWM
En esta experiencia, conoceremos otra aplicación muy utilizada en la técnica de control de
velocidad de motores de corriente continua (motor serie), la cual es apta para cualquier
motor que varíe su velocidad en función del valor promedio de tensión que a este se le
suministre. El mercado de los artefactos eléctricos requiere soluciones de bajo costo para
el control de motores así como también el mantenimiento de las funciones avanzadas
para el funcionamiento eficiente del motor. Es posible cumplir con estos dos requisitos
principales mediante un sistema de accionamiento de motor basado en
microcontroladores o sistema de generación de señales cuadradas de ancho variable que
ayude a los fabricantes de equipos originales a reducir los costos del sistema y a brindar
funciones avanzadas para las aplicaciones de control del motor.
En este tema, no podemos dejar de mencionar la configuración Darlington, la cual se
utiliza con el propósito de tener una ganancia de tensión casi unitaria y además con una
ganancia de corriente elevada..
Existe una gran variedad de motores que varían su construcción y forma de utilización de
acuerdo a la aplicación para la que fueron diseñados. Por ejemplo, los servomotores, los
motores paso a paso, de corriente continua, etc.
Una de las características principales del motor de corriente continua es que su velocidad
cambia de forma proporcional a la tensión continua que hay entre sus terminales.
Entonces, una manera simple de controlar la velocidad de estos motores es variar la
tensión del motor por medio de un potenciómetro y una resistencia en serie.
Sin embargo, aquí presentamos otra forma, al utilizar una señal de control rectangular con
un ancho del pulso controlada, aprovechando que el motor tiene características de filtro
pasabajos. De esta forma, el motor “verá” una señal casi continua que tendrá el valor
medio de la señal rectangular. Entonces cuando el ciclo de trabajo (ancho de los pulsos
en alto) aumente, crecerá el valor medio de la señal continua “vista” por el motor, como en
la Figura se ilustra esta idea en general.
El circuito IC 555, como generador de señal PWM.
Una señal PWM, es una señal del tipo cuadrada, que tiene la particularidad que podemos
alterar su forma y de esta manera cambiamos el valor promedio de ella. Existen varias
alternativas de cómo generala, una de ellas la utilizaremos aquí a través del uso del
LM555, el cual lo configuraremos como generador de PWM, su conexionado básico es la
siguiente:
Mantenimiento y operación de equipos electrónicos de potencia
76
Las ecuaciones asociadas a su diseño y comportamiento son las siguientes:
NOTA: Los valores de R1, R2 y C, se encuentran en Ohm y Faradios respectivamente.
Mantenimiento y operación de equipos electrónicos de potencia
77
Otra variante de este circuito, que permite mayor estabilidad, corresponde al expuesto a
continuación:
Mantenimiento y operación de equipos electrónicos de potencia
78
& Actividad
1. Realizar el calculo de los valores de Ciclo de trabajo (DC) y Frecuencia,
presentes en el ejemplo anterior, asumiendo las dos condiciones que se exponen:
2. Calcular el valor promedio de la siguiente señal
10V
0
10
20
40
mS
3. ¿Que ventajas tiene el control de velocidad de motores a través del sistema PWM?.
4. En el circuito expuesto como alternativa, indique la misión que cumplen los diodos en
su montaje.
5.
Determine el valor promedio, frecuencia y ciclo de trabajo de la siguiente señal. (5ptos)
30V
0
45mS
60mS
105mS
150ms
t
6. Un motor DC funciona a 1200 r.p.m. cuando es sometido a 8V. Determine su
velocidad, cuando se le aplican 12 V.
Mantenimiento y operación de equipos electrónicos de potencia
79
TEMA 9
Un
tiristor
Tiristores Elementales
es
un
dispositivo semiconductor
de
cuatro
capas
de
estructura pnpn con tres
uniones pn. Tiene tres
terminales: ánodo, cátodo
y compuerta. La figura
muestra el símbolo y el
modelo
cristalino
del
tiristor.
Cuando el voltaje del ánodo se hace positivo con
respecto al cátodo, las uniones J1 y J3 tienen
polarización directa o positiva. La unión J2 tiene
polarización inversa, y solo fluirá una pequeña
corriente de fuga llamada corriente de estado
inactivo ID. Se dice entonces que el tiristor está en
condición
de
bloqueo
directo
en
estado
desactivado. Si el voltaje de ánodo a cátodo VAK
se incrementa a un valor lo suficientemente
grande, la unión J2 polarizada inversamente
entrará en ruptura. Esto se conoce como ruptura
por avalancha y el voltaje correspondiente se
llama voltaje de ruptura directa VB0. Dado que las
uniones J1 y J3 tienen ya polarización directa,
habrá un movimiento libre de portadores a través
de las tres uniones, que provocará una gran
corriente directa del ánodo. Se dice entonces que
el dispositivo está en estado de conducción o
activado. La caída de voltaje se deberá a la
resistencia óhmica de las cuatro capas y será
pequeña, por lo común cercana a 1 volt.
Mantenimiento y operación de equipos electrónicos de potencia
80
La
corriente
del
ánodo deberá ser mayor
que un valor conocido
como
corriente
de
enganche IL, a fin de
mantener
la
requerida
de
cantidad
flujo
de
portadores a través de la
unión J2; de lo contrario,
al reducirse el voltaje del
ánodo
a
cátodo,
el
dispositivo regresará a la
condición de bloqueo. La corriente de enganche, es la corriente de ánodo mínima
requerida para mantener el tiristor en estado de conducción inmediatamente después de
que ha sido activado y se ha retirado la señal de la compuerta.
Una vez que el tiristor está activado, se comporta como un diodo en conducción y
ya no hay control sobre el
dispositivo. El tiristor seguirá
conduciendo,
porque
en
la
unión J2 no existe una capa de
agotamiento
debida
a
movimientos
libres
de
portadores. Sin embargo, si se
reduce la corriente directa del
ánodo por debajo del nivel
conocido como corriente de
mantenimiento IH, se genera
una
región
de
agotamiento
alrededor de la unión J2 debida
al
número
reducido
de
portadores; el tiristor estará entonces en estado de bloqueo. La corriente de
mantenimiento es del orden de los miliamperios y menor que la corriente de enganche. La
corriente de mantenimiento es la corriente de ánodo mínima para mantener al tiristor en
estado de régimen permanente.
Mantenimiento y operación de equipos electrónicos de potencia
81
Cuando el voltaje del cátodo es positivo con respecto al ánodo, la unión J2 tiene
polarización directa, pero las uniones J1 y J3 tienen polarización inversa. Esto es similar a
dos diodos conectados en serie con un voltaje inverso a través de ellos. El tiristor estará
en estado de bloqueo inverso y una corriente de fuga, conocida como corriente de fuga
inversa IR fluirá a través del dispositivo.
Un tiristor se puede activar aumentado el voltaje directo de ánodo a cátodo más
allá de VB0, pero esta forma de activarlo puede ser destructiva. En la práctica, el voltaje
directo se mantiene por debajo de este valor, y el tiristor se activa mediante la aplicación
de un voltaje positivo entre la compuerta y el cátodo.
Lo anterior puede entenderse mejor cuando se observa la gráfica de la curva
característica del tiristor, que se muestra en la figura anterior.
DIAC
El DIAC es un dispositivo semiconductor de dos conexiones. Es un diodo bidireccional
disparable que conduce la corriente sólo tras haberse superado su tensión de disparo, y
mientras la corriente circulante no sea inferior al valor característico para ese dispositivo.
El comportamiento es fundamentalmente el mismo para ambas direcciones de la
corriente. La mayoría de los DIAC tienen una tensión de disparo de alrededor de 30 V. En
este sentido, su comportamiento es similar (pero controlado de forma mucho más precisa
y a una tensión menor) a una lámpara de neón.
Los DIAC son una clase de tiristor, y se usan normalmente para disparar los triac, otra
clase de tiristor.
Es un dispositivo semiconductor de dos terminales,
llamados
ánodo
y
cátodo.
Actúa
como
un
interruptor bidireccional el cual se activa cuando el
voltaje entre sus terminales alcanza el voltaje de
ruptura, dicho voltaje puede estar entre 20 y 36
volts según la referencia.
El DIAC es básicamente una combinación paralela inversa de dos terminales de capas de
semiconductor que permiten el disparo en cualquier dirección. Las características del
dispositivo muestran que hay un voltaje de ruptura en ambas direcciones. Esta posibilidad
de una condición de encendido en cualquier dirección puede usarse al máximo para
aplicaciones en AC.
Mantenimiento y operación de equipos electrónicos de potencia
82
La siguiente imagen muestra como conectar el dispositivo, de manera muy básica,
considerando la forma de situar la carga e ingreso de la señal de disparo.
Circuitos de gobierno de Tiristores
Mantenimiento y operación de equipos electrónicos de potencia
83
En algunos circuitos con tiristores (SCR), el voltaje de entrada es de corriente directa.
Como se sabe, el tiristor se "amarra" en el
estado de conducción, en tanto es un
dispositivo de enganche. Una vez que el
tiristor entra en conducción, es necesario
que su corriente anódica llegue a ser menor
a la corriente de mantenimiento.
Para poder controlar la conmutación del
tiristor en corriente directa existe una
técnica llamada de conmutación forzada,
que
consiste
en
agregar
un
circuito
adicional, cuya función es obligar a que la corriente que fluye por el tiristor pase por cero.
Esta técnica encuentra aplicación en los convertidores de dc a dc (pulsadores) y de dc a
ac (inversores.)
Hay una gran diversidad de circuitos de conmutación forzada, entre los que podemos
menciona al circuito de auto conmutación, conmutación por impulso, por
Figura 2.1
pulso resonante, etc. El circuito anterior opera de la siguiente manera:
Cuando se dispara el tiristor T1, la corriente de conducción fluye a través de RL y por el
ánodo del tiristor, y si es mayor que la corriente de mantenimiento, T1 quedará "cebado"
cuando se haya retirado el pulso de compuerta. Al mismo tiempo, el capacitor C se
cargará por medio de R, existiendo un potencial más positivo en la terminal conectada al
interruptor. Cuando cerramos el interruptor, el capacitor se descargará sobre el tiristor,
polarizándolo inversamente; de esta forma, el voltaje en el tiristor adquiere un potencial
inverso, obligando a la corriente que fluye por él a intentar cambiar de dirección, lo que la
obligará a pasar por cero. Adicionalmente se debe decir que es necesario que el tiempo
de carga del capacitor sea menor a la frecuencia de la señal de activación de la
compuerta, y al mismo tiempo, mayor que el tiempo de apagado del tiristor T1, para que el
circuito de conmutación no influya en el funcionamiento principal del circuito.
El circuito tiene una limitación: solo se garantiza su funcionamiento para cargas
resistivas, ya que en presencia de cargas inductivas sería necesario considerar el
efecto del desfase de la corriente provocado por la carga.
Mantenimiento y operación de equipos electrónicos de potencia
84
& Actividad
1. Para el Caso de disparo por corriente continua, determine el valor de RS, necesario
para efectuar el disparo con una tensión de 12V, proveniente de un Automóvil, y que
utiliza un SCR, que tolera como máximo en su compuerta una corriente de 30mA. La
carga a controlar por el SCR, corresponde a una lámpara de 50W. Estime los valores
que faltan, y modele el circuito.
2. ¿Cuál es la diferencia entre la corriente de mantenimiento y de enganche?
3. En el siguiente Circuito, justifique la aparición de cada una de las formas de onda.
Mantenimiento y operación de equipos electrónicos de potencia
85
5. Diseñe un circuito de control para un SCR, a partir del modelo de conmutación
forzada. En dicho diseño exponga por completo, el circuito necesario para establecer el
cebado inicial, incluyendo la selectividad de los componentes tanto de cebado y
conmutación.
6. Que entiende por el dv/dt.
7. Como se dimensiona la resistencia del gate para el caso del SCR.
8. Que ocurriría si el condensador de la red de conmutación estuviese excesivamente
dimensionado.
Mantenimiento y operación de equipos electrónicos de potencia
86
TEMA 10
Triac
El triac (TRIODE OF ALTERNATING CURRENT) es un dispositivo semiconductor
de tres terminales que se usa para controlar el flujo de corriente promedio a una
carga, con la particularidad de que conduce en ambos sentidos y puede ser
bloqueado por inversión de la tensión o al disminuir la corriente por debajo del
valor de mantenimiento. El triac, a diferencia del SCR, puede ser disparado
independientemente de la polarización de puerta, es decir,
mediante una corriente de puerta positiva o negativa. Cuando
el triac conduce, hay una trayectoria de flujo de corriente de
muy baja resistencia de una terminal a la otra, dependiendo la
dirección de flujo de la polaridad del voltaje externo aplicado.
Cuando el voltaje es mas positivo en MT2, la corriente fluye
de MT2 a MT1 en caso contrario fluye de MT1 a MT2. En
ambos casos el triac se comporta como un interruptor
cerrado. Cuando el triac deja de conducir no puede fluir corriente entre las
terminales principales sin importar la polaridad del voltaje externo aplicado por
tanto actúa como un interruptor abierto.
Debe tenerse en cuenta que si se aplica una variación de tensión importante al
triac (dv/dt) aún sin conducción previa, el triac puede entrar en conducción directa.
El Triac actúa como dos rectificadores controlados de
silicio (SCR) en paralelo, este dispositivo es equivalente a
dos latchs.
CARACTERISTICA TENSION – CORRIENTE
El gráfico describe la característica tensión – corriente del Triac. Muestra la
corriente a través del Triac como una función de la tensión entre los ánodos MT2 y
MT1. El punto VBD (tensión de ruptura) es el punto por el cual el dispositivo pasa de
una resistencia alta a una resistencia baja y la corriente, a través del Triac, crece
con un pequeño cambio en la tensión entre los ánodos. El Triac permanece en
estado ON hasta que la corriente disminuye por debajo de la corriente de
Mantenimiento y operación de equipos electrónicos de potencia
87
mantenimiento IH. Esto se realiza por medio de la disminución de la tensión de la
fuente. Una vez que el Triac entra en conducción, la compuerta no controla mas la
conducción, por esta razón se acostumbra dar un pulso de corriente corto y de
esta manera se impide la disipación de energía sobrante en la compuerta. El
mismo proceso ocurre con respecto al tercer cuadrante, cuando la tensión en el
ánodo MT2 es negativa con respecto al ánodo MT1 y obtenemos la característica
invertida. Por esto es un componente simétrico en cuanto a conducción y estado
de bloqueo se refiere, pues la característica en el cuadrante I de la curva es igual
a la del III.
El triac puede ser disparado en cualquiera de los cuadrantes I y III mediante la
aplicación entre los terminales de compuerta G y MT1 de un impulso positivo o
negativo. Esto le da una facilidad de empleo grande y simplifica mucho el circuito
de disparo. La forma de cómo disparar el triac en los cuadrantes II y Iv, es de
responsabilidad del alumno averiguarlas.
A continuación se expone un gráfico, en el cual se muestra la forma de disparo del
SCR, en todos los cuadrantes posibles.
Mantenimiento y operación de equipos electrónicos de potencia
88
Hasta hace unas décadas, la regulación de potencia aplicada a una carga de
corriente alterna se realizaba mediante un reóstato, o resistencia variable, de gran
tamaño que se intercalaba en uno de los cables de alimentación. Otra opción
consistía en utilizar transformadores con tomas múltiples y un conmutador que
seleccionaba la toma adecuada en cada momento. Estos elementos absorbían
parte de la potencia, o casi toda en el caso del reóstato, con lo cual el rendimiento
era muy bajo, sobre todo cuando la potencia para aplicar a la carga era pequeña.
El transformador con tomas múltiples producía mejor rendimiento, pero, era
necesario que su potencia fuera igual o mayor que la que se debía aplicar a la
carga, lo que implicaba que fueran de gran tamaño y por tanto de gran peso. Los
reguladores electrónicos de potencia, basados en dispositivos electrónicos
(TRIAC) pesan unos pocos gramos y controlan cargas elevadas, además de
tener un alto rendimiento, ya que dejan pasar hacia la carga la parte de
energía seleccionada sin absorber la restante.
El DIAC es un dispositivo de disparo que puede utilizarse para generar el
impulso de corriente de puerta necesario para disparar un elemento de control,
como un SCR o un TRIAC.
EL DIAC es un elemento de dos terminales y 5 capas (figura 1) diseñado
para dispararse cuando la tensión entre sus terminales supera la tensión de
ruptura de la unión pn central. Una vez disparado, la tensión entre sus extremos
disminuye, aunque mantiene la conducción. Al igual que el TRIAC, el DIAC
permite la conducción en ambos sentidos por lo que no tiene sentido distinguir
entre cátodo y ánodo.
Considere el circuito de la figura 2. La
señal Vin es una señal de alterna (por ejemplo,
la propia tensión de la red o la salida de un
transformador): Vin(t) = VAsenωt. Consideremos
que en principio el DIAC y el TRIAC se
encuentran en su estado de bloqueo. Si
suponemos que RL << R, se cumplirá que V1 ≈
Vin. El condensador se cargará a través de R
sometido a una tensión tipo senoidal. El proceso de carga del condensador durará
Mantenimiento y operación de equipos electrónicos de potencia
89
hasta que la tensión VC(t) iguale la tensión de disparo VB0 del DIAC. En ese
momento, el condensador se descargará a través del DIAC generando un pulso de
corriente que disparará al TRIAC. El TRIAC pasará a su estado de conducción,
con lo que prácticamente toda la tensión de entrada V in caerá en la carga RL. En el
momento en que la tensión Vin se haga lo bastante pequeña como para que la
corriente que atraviesa al TRIAC y a RL sea inferior a la corriente de
mantenimiento del TRIAC, este vuelve a su estado de bloqueo y comienza de
nuevo el proceso de carga del condensador.
Obsérvese que el funcionamiento del circuito descrito es válido
tanto para el semiciclo positivo de Vin como para el semiciclo negativo, ya
que el DIAC y el TRIAC presentan características simétricas ante diferencias de
tensión entre sus terminales positivas y negativas.
El valor de la resistencia R determina en qué instante se produce el
disparo del DIAC (y por tanto del TRIAC) con lo que ajustando el valor de esta
resistencia se controla la potencia suministrada a la carga. (La carga RL
prácticamente recibe potencia únicamente cuando el TRIAC está en su estado de
conducción).
Si suponemos que el condensador se carga desde un potencial
VC = 0, y que Vin(t) = VAsenωt, la tensión VC (t) durante el proceso de carga viene
dada por:
t
RCω exp −
− RCω cos(ωt ) + sen(ωt )
RC
VC (t ) = VA
1 + R 2C 2ω 2
(2)
En
la
figura
siguiente se representa el valor
VC (t)/VA, obtenido a partir de la ecuación 2, para distintos valores de R, con una
frecuencia de 50 Hz y con C = 1 µF.
Mantenimiento y operación de equipos electrónicos de potencia
90
La gráfica anterior, es solo una representación, que nos indica como podemos
variar la carga del condensador en función de las variables asociadas al circuito.
Los triac acoplados óptimamente, combinan un diodo emisor de luz (LED) con un
triac foto detector (foto triac) dentro de un mismo encapsulado opaco con un
esquema mostrado en la siguiente figura.
Al no existir conexión eléctrica entre la entrada y la salida, el acoplo es
unidireccional (LED al fototriac) y permite un aislamiento eléctrico entre ambos
dispositivos de hasta 7500 V. Además algunos fototriac incluyen un circuito de
detección de paso por ceso que permite sincronizar señales de la red eléctrica
con señales de control del led para ajustar el ángulo de conducción. Cuando
trabajamos con un dispositivo opto aislador que funcione bajo este principio, ya
sea opto acoplador transistorizado, con salida a SCR o Triac, debemos tener en
cuenta que para hacerlo funcionar debemos considerar todas aquellas ecuaciones
asociadas al control de un LED convencional, con la diferencia que este tiene una
corriente de funcionamiento que no está normalizada por el color del led, si no
que lo entrega el fabricante del dispositivo opto acoplador. Además se deja en
claro desde ya, que este dispositivo no es capaz de suministrar grandes potencias
de salida, y por lo tanto está pensado para comandar a través de este, otro de
mayor potencia. En esta experiencia, conoceremos este dispositivo, pero aplicado
a medias potencias, además, se conocerán algunas razones en la cuales es
necesario, mantener aislamiento galvánico para el disparo del dispositivo.
Interfaz Tiristorizada.
Al no existir conexión eléctrica entre la entrada y la salida, es posible conseguie un
acoplo es unidireccional (LED al fototriac) y permite un aislamiento eléctrico entre
ambos dispositivos de hasta 7500 V. Además algunos fototriac incluyen un circuito
de detección de paso por ceso que permite sincronizar señales de la red eléctrica
con señales de control del led para ajustar el ángulo de conducción. Cuando
trabajamos con un dispositivo opto aislador que funcione bajo este principio, ya
sea opto acoplador transistorizado, con salida a SCR o Triac, debemos tener en
cuenta que para hacerlo funcionar debemos considerar todas aquellas ecuaciones
asociadas al control de un LED convencional, con la diferencia que este tiene una
corriente de funcionamiento que no está normalizada por el color del led, si no
que lo entrega el fabricante del dispositivo opto acoplador. Además se deja en
claro desde ya, que este dispositivo no es capaz de suministrar grandes potencias
de salida, y por lo tanto está pensado para comandar a través de este, otro de
mayor potencia. En esta experiencia, conoceremos este dispositivo, pero aplicado
Mantenimiento y operación de equipos electrónicos de potencia
91
a medias potencias, además, se conocerán algunas razones en la cuales es
necesario, mantener aislamiento galvánico para el disparo del dispositivo.
Mantenimiento y operación de equipos electrónicos de potencia
92
Circuitos Recortadores de Señal (Dimmer).
•
Dimmer de Constante de tiempo simple.
Mantenimiento y operación de equipos electrónicos de potencia
93
•
Dimmer de Constante de doble constante de tiempo.
Mantenimiento y operación de equipos electrónicos de potencia
94
& Actividad
1.
2.
3.
4.
5.
6.
¿Qué es un latchs?.
¿Qué significa disparar un triac en el primer cuadrante?.
¿Qué significa disparar un triac en el tercer cuadrante?.
¿Cuál es la diferencia entre un SCR y un Triac?
¿Qué ocurre si disparamos un Triac que esté siendo alimentado con DC?.
¿Qué ventajas tiene el utilizar un Triac como interruptor?¿En que momento
deja de conducir?.
7. ¿Qué precauciones se deben tener en la red eléctrica al utilizar tiristores en
configuraciones como el dimmer?
8. Si alimentamos un circuito con corriente alterna y utilizamos un triac, ¿en que
momento es adecuado disparar este dispositivo?
9. Describa el funcionamiento del dimmer de doble constante de tiempo.
10. Describa el funcionamiento del dimmer de constante de tiempo simple.
11. Diseñe un circuito que permita el recorte de señal sinusoidal, de procedencia
nacional, con el fin que el control se efectúe entre los ángulos de conducción
entre los 10 grados a los 300 grados.
12. Dibuje en sincronía con una señal sinusoidal de 100 V de amplitud y
frecuencia 60 Hz, un ejemplo de recorte de señal efectuado por el Dimmer de
doble constante de tiempo.
Mantenimiento y operación de equipos electrónicos de potencia
95
TEMA 11
Sensores Electrónicos Industriales
Los sensores y actuadores son los dispositivos del sistema de medida y control que
interactúan con el sistema físico que se pretende estudiar o controlar: los primeros
permiten la toma de medidas de las distintas magnitudes físicas que se van a analizar;
mientras que los actuadores posibilitan la modificación de dicho sistema.
Aunque es habitual emplear indistintamente los términos ‘sensor’ y ‘transductor’ hay que
tener en cuenta que no son lo mismo. Un sensor es un dispositivo que a partir de la
energía del medio, proporciona una señal de salida que es función de la magnitud que se
pretende medir. Se denomina sensor primario al dispositivo que transforma la magnitud
física a medir en otra magnitud transducible. Un transductor es el dispositivo que
transforma una magnitud física (mecánica, térmica, magnética, eléctrica, óptica, etc.) en
otra magnitud, normalmente eléctrica.
El concepto de transductor es más amplio, ya que un transductor puede incluir, por
ejemplo, un sensor y un acondicionador de señal o un conversor analógico-digital. Para
obtener una determinada medida en un sistema físico puede utilizarse un sensor, un
transductor a una combinación de un sensor primario con un transductor. Por ejemplo,
una posible solución para medir la altura del agua de un depósito sería utilizar un flotador
como sensor primario (convertiría el nivel de agua del depósito en un desplazamiento) y
un potenciómetro como transductor (convertiría el desplazamiento en una variación de
resistencia).
Mantenimiento y operación de equipos electrónicos de potencia
96
Aquellos efectos físicos que provocan un cambio en alguna de las características
eléctricas de un material o dispositivo, pueden utilizarse para realizar la transducción de la
magnitud física causante de la variación. Las variaciones eléctricas que pueden darse
Mantenimiento y operación de equipos electrónicos de potencia
97
son: generación de tensión o intensidad por parte del dispositivo, o modificaciones en la
resistencia, capacidad o inductancia del mismo.
Existen multitud de métodos de clasificar los sensores según se atienda a una
peculiaridades u otras de los sensores, de forma que según qué concepto se esté
analizando se empleará una clasificación u otra.
Según requieran Alimentación Externa
Aquellos transductores cuyo funcionamiento se basa en la variación de alguno de sus
parámetros eléctricos, requerirán de una alimentación externa para realizar la medida.
Estos transductores se denominan Moduladores o Pasivos. Por el contrario, aquellos
transductores capaces de generar tensión o intensidad a partir de la magnitud física que
se desea medir, no requieren de alimentación externa y se denominan Activos o
Generadores.
Transductores Moduladores o Pasivos
a) Transductores Resistivos.- La magnitud a medir provoca un cambio de la resistencia
del transductor. Según puede observarse los parámetros modificables son la longitud, la
sección y la conductividad. Ejemplos de este tipo de transductores son los potenciómetros
y galgas extensiométricas (varía la longitud); las resistencias variables con la temperatura
(RTD), transductores de efecto Hall y fotoresistencias (varía la conductividad); y los
termistores CTN y CTP (variación de la resistencia con la temperatura en los
semiconductores).
b) Transductores Capacitivos.- Según lo observado, hay tres formas de cambiar la
capacidad de un dispositivo: modificando el área enfrentada de las dos capas, cambiando
la distancia a la que se encuentran dichas capas, y con una variación en la constante del
dieléctrico que las separa. Estas tres posibilidades pueden utilizarse para la construcción
de transductores de desplazamiento lineales y rotacionales basados en el cambio de
área, transductores de fuerza basados en la modificación de la distancia y medidores de
nivel basados en la modificación de la constante dieléctrica.
Mantenimiento y operación de equipos electrónicos de potencia
98
Las principales ventajas de los transductores capacitivos son su mínimo error de carga, ya
que no existe contacto mecánico, la alta estabilidad, reproductividad y resolución; y el no
provocar grandes campos eléctricos ni magnéticos como los transductores inductivos.
Como inconvenientes hay que mencionar la posibilidad de interferencias capacitivas, la
pérdida de sensibilidad que se produce al apantallar los cables de conexión, y la no
linealidad (se reduce empleando condensadores diferenciales).
Estos detectores de proximidad capacitivos son interruptores de límite, que trabajan sin
roces ni contactos. Pueden detectar materiales de conducción o no conducción
eléctrica, que se encuentran en estado sólido, líquido o pulvurento, entre otros: vidrio,
cerámica, plástico, madera, aceite, agua, cartón y papel. El DETECTOR se conecta
cuando él y el material se encuentran uno enfrente del otro a una determinada distancia.
APLICACIONES:
– Señalización del nivel de llenado en recipientes de material plástico o vidrio
– Control del nivel de llenado con embalajes transparentes
– Aviso de roturas de hilo en bobinas
– Aviso de rotura de cinta transportadora
– Cuenta de botellas
– Regulación del bobinado y de los esfuerzos de tracción de cintas
– Cuenta de todo tipo de objetos
Mantenimiento y operación de equipos electrónicos de potencia
99
La superficie activa de un sensor está formada por dos electrodos metálicos dispuestos
concéntricamente, éstos se pueden considerar como los electrodos de un condensador.
Al acercarse un objeto a la superficie activa del sensor, se origina un campo eléctrico
delante de la superficie del electrodo. Esto se traduce con una elevación de la capacidad
y el oscilador comienza a oscilar.
Características técnicas de un Sensor Capacitivo
Transductores Inductivos.- De acuerdo a lo observado en principios físicos, se muestra
que la inductancia depende de la variación del flujo con respecto a la intensidad, pero el
flujo es función de la inducción mutua y de la reluctancia magnética. Como esta depende
parámetros como el número de vueltas de la inductancia, la permeabilidad del núcleo, la
distancia de entrehierro existente, etc., se pueden diseñar transductores inductivos para la
medición de desplazamientos, cambiando el número de vueltas o mediante núcleo móvil;
detectores de presencia, etc. Las principales ventajas de este tipo de transductores es su
sensibilidad y lo poco que son afectados por la humedad.
Como inconvenientes cabe destacar que la temperatura de funcionamiento debe ser
siempre inferior a la Tª de Curie, lo que limita el margen de utilización; y que la inductancia
Mantenimiento y operación de equipos electrónicos de potencia
100
se ve afectada por campos magnéticos, lo que requiere el apantallamiento de los
conductores.
El Detector Inductivo es un fin de
carrera que trabaja exento de roces
y sin contactos, no está expuesto a
desgastes mecánicos y en general
es resistente a los efectos del clima.
Su empleo es especialmente
indicado allí donde se requieren
elevadas exigencias, precisión en el
punto de conexión, duración,
frecuencia
de
maniobras,
y
velocidad de accionamiento
Funcionamiento:
El DI es excitado por un campo alterno de alta frecuencia, el cual se origina en la
"superficie activa" del DI, la magnitud de este campo alterno determina el "alcance" del
aparato. Cuando se aproxima un material buen conductor eléctrico o magnético, el
campo se amortigua. Ambos estados (campo amortiguado o no amortiguado) son
valorados por el DI y conducen a un cambio de la señal en la salida.
Mantenimiento y operación de equipos electrónicos de potencia
101
Transductores Electromagnéticos.- Cuando la magnitud medir provoca una alteración
sobre el campo eléctrico o mágnetico, se pueden emplear este tipo de transductores.
Princpalmente se basan en la Ley de Faraday y en el Efecto Hall
Ley de Faraday.- Cuando se produce una variación del flujo magnético sobre una bobina,
se induce una tensión en sus extremos. Esta variación puede estar provocada por la
variación de la intensidad o por el movimiento del núcleo de la bobina.
Efecto Hall.- Si por un conductor circula una corriente y existe un campo magnético
aplicado perpendicularmente a este, aparece una diferencia de potencial transversal al
conductor.
Estas propiedades permiten la construcción de transductores de desplazamiento, tanto
lineales como rotacionales, detectores de proximidad, etc.
Mantenimiento y operación de equipos electrónicos de potencia
102
Transductores Generadores o Activos
Los transductores activos son aquellos que generan una señal eléctrica a partir de la
magnitud física que miden, sin necesidad de alimentación externa. Se pueden subdividir
según el efecto utilizado para la generación:
•
Efectos Termoeléctricos.- Los transductores termoeléctricos se basan en los efectos
reversibles Seebeck, Peltier y Thomson.
•
Efecto Seebeck.- En un circuito con dos metales distintos y homogéneos con dos
uniones a distinta temperatura, aparece una corriente eléctrica o una fuerza
termoelectro-motriz (f.t.e.m.) si se abre el circuito.
Siendo EAB la f.t.e.m., SA y SB T la temperatura, y la potencia termoeléctrica absoluta de
los metales A y B, respectivamente. SAB es el coeficiente de Seebeck para la unión de
los metales A y B.
Sensores Primarios de Presión
Comparación con una presión conocida.- La diferencia entre la presión que desea
medirse (P) y la presión de referencia (Pref) provoca un desplazamiento del líquido
contenido en el tubo. Siendo g la aceleración de la gravedad y la densidad del líquido, el
desnivel provocado (h) es:
Mantenimiento y operación de equipos electrónicos de potencia
103
Tubo de Pitot.- Tubo en ángulo recto con una apertura, el líquido sube hasta que la
presión de la columna se equilibra con la del líquido. Midiendo la altura alcanzada por el
líquido se puede obtener la velocidad del mismo, y con ésta el caudal.
Mediante incremento de presión.- Se introduce una placa con un orificio de sección S2
el la tubería, de sección S1. La velocidad del líquido será función del incremento de
presiones a cada extremo de la placa. Una vez conocida la velocidad se puede calcular el
caudal.
Mediante la variación de la sección (Rotámetro).- Se intercala en la tubería un tramo
con sección variable que contiene un flotador. La altura alcanzada por dicho flotador será
función del caudal que circula por dicha tubería.
Mediante flujo magnético.- Si el fluido es conductor, al circular a través de un campo
magnético provocará una fuerza electromotriz inducida que variará con la velocidad del
fluido.
Sensores Primarios de Nivel
Una polea con un flotador y un contrapeso es un sensor primario muy simple que convierte el nivel de líquido en un desplazamiento angular. Otra posibilidad es medir la
diferencia de presión entre el fondo y la superficie del líquido.
Mantenimiento y operación de equipos electrónicos de potencia
104
Sensores Primarios de Fuerza y Par
Se puede transducir una fuerza/par comparándola con otra conocida, como por ejemplo
en una balanza, o aplicándola a un elemento elástico denomino Célula de Carga. En las
células de carga eléctricas el efecto es una deformación que se medirá normalmente con
galgas extensiométricas, en las hidráulicas y neumáticas, el efecto es un aumento de la
presión de un líquido o gas respectivamente.
Transductores Monolíticos
Los transductores monolíticos se basan en las características de las uniones
semiconductoras para realizar las medidas de multitud de parámetros físicos. Algunos
Mantenimiento y operación de equipos electrónicos de potencia
105
ejemplos de importancia son los sensores de temperatura integrados, fototransistores,
magnetodiodos y detectores de gases basados en transistores MOSFET.
Detectores Fotoeléctricos.-
Mantenimiento y operación de equipos electrónicos de potencia
106
Mantenimiento y operación de equipos electrónicos de potencia
107
Resumen de Sistemas sensometricos
Actividad Resumen
1. Mencione diferencias entre un transductor y un sensor.
2. ¿Que es un sistema modulador?
3. Bosqueje brevemente un modulador resistivo.
4. Indique ventajas de un sensor capacitivo.
5. ¿Cómo operan los transductores magnéticos?
6. ¿Cómo opera el Efecto Hall?
7. Bosqueje brevemente algún método que permita la medición de r.p.m. considerando
que se dispone de una dinamo de 0 a 12 V y un voltímetro.
8. ¿Qué unidades de emplean para la medición de presión de fluidos?
9. ¿Diseñe un circuito para implementar el dispositivo LM35?
10. Plantee la solución para llevar a cabo la automatización del llenado automático de un
estanque.
11. ¿Qué datos técnicos son relevantes a considerar en la selectividad de los sensores
fotoeléctricos?
12. Diseñe un circuito electrónico que permita el mando de un motor eléctrico de inducción
monofásico, que sea activado por la acción del acercamiento de una lámina de cobre
sobre un sensor inductivo. El mando de este motor, debe ser Tiristorizado con el
respectivo sistema de detección de cruce por cero.
Mantenimiento y operación de equipos electrónicos de potencia
108
Sensores Electrónicos Automotrices
TEMA 12
En el presente los autos cuentan con un cerebro, están tan tecnologizados con
electrónica que dependen de computadoras o unidades de mando.
ECU es el nombre de la sigla en inglés de la Unidad de Mando. ECU = Engine
Control Unit. Este dispositivo sofisticado del automóvil contiene un chip que
comanda por un programa a través de órdenes para la función del motor.
CONECTOR E.C.U. HYUNDAI ACCENT 1997
UNIDAD DE CONTROL ELECTRÓNICA (ECU)
Los motores diesel con gestión electrónica al igual que los motores de inyección
de gasolina, llevan una unidad de control electrónica (ECU) o centralita. La unidad
de control es de técnica digital, funciona como un ordenador, tiene un
microprocesador que compara las distintas señales que recibe del exterior
(sensores) con un programa interno grabado en memoria y como resultado genera
unas señales de control que manda a los distintos dispositivos exteriores que
hacen que el motor funcione. La ECU adapta continuamente sus señales de
Mantenimiento y operación de equipos electrónicos de potencia
109
control al funcionamiento del motor. La unidad de control está colocada en el
habitáculo de los pasajeros para protegerla de las influencias externas.
El hecho de usar una ECU tiene la ventaja de reducir el consumo de combustible,
mantener bajos los niveles de emisiones de escape al tiempo que mejora el
rendimiento del motor y la conducción. La ECU controla el régimen de ralentí del
motor, también se encarga de limitar el régimen máximo de revoluciones
reduciendo la cantidad de combustible a inyectar en los cilindros. Si el aire que
aspira el motor alcanza temperaturas altas o al decrecer la densidad del aire, la
ECU reduce la cantidad de inyección a plena carga a fin de limitar la formación de
humos de escape. La ECU también reduce la cantidad de inyección de
combustible a plena carga, si la temperatura refrigerante motor alcanza valores
muy elevados que puedan poner en peligro el motor.
Las señales que recibe la ECU de los distintos sensores son controladas
continuamente, en el caso de que falle alguna señal o sea defectuosa la ECU
adopta valores sustitutivos fijos que permitan la conducción del vehículo hasta que
se pueda arreglar la avería.
Si hay alguna avería en el motor esta se registrara en la memoria de la ECU. La
información sobre la avería podrá leerla el mecánico en el taller conectando un
aparato de diagnosis al conector que hay en el vehículo a tal efecto.
Si se averían los sensores o los elementos de ajuste que podrían suponer daños
en el motor o conducir a un funcionamiento fuera de control del vehículo, se
desconecta entonces el sistema de inyección, parándose lógicamente el vehículo.
Para informar al conductor de que
algún sistema del
motor está fallando, la ECU enciende
un testigo en el
tablero de instrumentos.
Mantenimiento y operación de equipos electrónicos de potencia
110
El testigo se enciende cuando hay un fallo en alguno de los siguientes
componentes
•
•
Sensor de elevación de aguja. Sensor de impulsos (rpm.).
Sensor de posición, regulador de caudal de combustible.Sensor de posición del
pedal del acelerador.
• Válvula EGR.
• Servomotor, regulador de caudal de combustible
• Válvula magnética de avance a la inyección.
Diagnosis: Para poder consultar los fallos en el funcionamiento del motor así
como para poder hacer pruebas y ajustes en los elementos que lo permiten
necesitamos un aparato de diagnosis que nos va a servir para:
- Leer los códigos de avería, así como identificarlos.
- Solicitar datos sobre el estado actual de las señales de los sensores y
compararlas con los valores teóricos de los manuales de verificación.
- Hacer pruebas de funcionamiento sobre los distintos componentes eléctricos
(electroválvulas, relés, etc.) del sistema motor, así como de otros sistemas (ABS,
servodirección, cierre centralizado, etc.)- Se pueden hacer ajustes, esto nos va permitir variar en nº de rpm en ralentí así
como la cantidad de combustible a inyectar. Además se pueden ajustar el avance
a la inyección y la cantidad de reenvió de los gases de escape (sistema EGR).
SEÑALES DE ENTRADA A LA ECU:
Mantenimiento y operación de equipos electrónicos de potencia
111
1Señal
del
sensor
de
posición
señal del sensor de temperatura del combustible.
23456del
Señal
del
Señal
Señal
Señal
sensor
del
del
sensor
del
Señal
del
sensor
de
de
temperatura
de
del
de
servomotor
elevación
sensor
sensor
medidor
NTC
de
del
sobre
de
y
aguja.
régimen
(rpm).
refrigerante
motor.
del
presión
volumen
de
temperatura
del
turbo.
y
señal
aire.
aire
de
7- Señales del sensor de posición del pedal del acelerador.
ECUSeñal
del
sensor
de
presión
atmosférica
que
se
encuentra
en
la
misma
ECU.
Se
tienen
otras
señales
de
que
el
vehículo
monte
caja
aire acondicionado e inmovilizador.
entrada
en
de
cambios
caso
de
automática,
SEÑALES DE SALIDA DE LA ECU:
1.- Señal de control del servomotor, señal
de control de la válvula
magnética y señal de control de la válvula
de STOP.
2- Señal de control del relé que alimenta a
las bujías.
3- Bujías de incandescencia. En este caso
tenemos 5 bujías
por que el motor es de 5 cilindros.
4- Señal de control del relé que alimenta a
los electro ventiladores.
5- Electro ventiladores de refrigeración del
motor.
6- Señal de control del sistema EGR.
7- Señal de control de la presión del tubo.
Se tienen otras señales de salida en caso de que el vehículo monte
inmovilizador y otros extras.
Mantenimiento y operación de equipos electrónicos de potencia
112
Sonda Lambda.
Es un dispositivo capaz de medir la relación Lambda de los gases de escape en
función de la cantidad de oxigeno que posean. La medida de la sonda Lambda es
una señal de voltaje de entre 0 y 1 v.
La sonda Lambda está formada interiormente por
dos electrodos de platino separados por un
electrolito
de
cerámica
porosa.
Uno de
los
electrodos está en contacto con la atmósfera y el
otro con los gases de escape. Además la sonda
está dispuesta de una sonda interna de caldeo
para llegar fácilmente a los 300 grados centígrados, su temperatura óptima de
funcionamiento.
Al estar cada uno de los electrodos de platino en entornos diferentes adquieren
cantidades diferentes de iones de oxigeno. De esta manera uno de ellos queda
eléctricamente más cargado que el otro, creando entre ellos una diferencia de
voltaje o diferencia de potencial.
CAUDALIMETRO.
El Medidor Masa Aire va fijado a la caja del Filtro de Aire y, el SENSOR de
medición, irá en una conducción bypass que consta de un Filamento Térmico (Hilo
Platino) y un Sensor Temperatura (resistencia ntc) que será regulado por un
Circuito Electrónico de manera que mantenga constante la diferencia de
Temperaturas entre Filamento Térmico y Caudal Aire que entra a los Cilindros. Al
aumentar entrada Aire, debe aumentarse Corriente Calefacción, regulando su
variación un Circuito Electrónico.
A cuanta más velocidad fluya el aire, y cuanto mayor sea la Densidad del mismo,
se disipa más calor del elemento Térmico y, por tanto, disminuye la Resistencia
Mantenimiento y operación de equipos electrónicos de potencia
113
Eléctrica. Esta variación de resistencia será registrada por la UCE como un
aumento del Volumen aire aspirado por el motor, lo que implica que deberá
suministrarse mayor cantidad de Combustible.
SENSOR DE LLUVIA.
Su funcionamiento es basado en un emisor que despide una luz infrarroja y un
receptor
encargada
de
recoger
esta
luz.
Al empezar a llover las gotas atraviesan esta luz impidiendo que llegue
correctamente al receptor y de esta manera activando el limpiaparabrisas.
Mantenimiento y operación de equipos electrónicos de potencia
114
Para evitar que una película de hielo active siempre el sistema se equipa al
sensor con un sistema calefactor que se activa al dar el contacto así se evita
que el hielo rompa el haz de luz infrarroja, este sistema automático se puede
desactivar a voluntad del conductor para así dejar el sistema en sus manos.
SENSOR POSICIÓN MARIPOSA ACELERACIÓN.
Este sensor se encarga de informar a la unidad electrónica de control del
vehículo sobre la apertura de la mariposa de
aceleración.
Su funcionamiento es muy sencillo se basa
en un potenciómetro, el conductor al pisar el
pedal diríamos que mueve el cursor del
potenciómetro.
Mantenimiento y operación de equipos electrónicos de potencia
115
Si este sensor no funciona correctamente el vehículo nos puede dar problemas
tales como falta de estabilidad en RPM, rateo o una pérdida de Potencia
acompañada
de
un
aumento
del
consumo
de
combustible.
INDUCTIVO RPM POSICIÓN CIGÜEÑAL.
Le da información a la UCE sobre la
posición del cilindro número uno en
PMS. Es un inductivo puesto cerca
del volante de inercia o en cualquier
Corona dentada. Este da la
capacidad a la unidad de decidir el
momento justo en que los inyectores
han de abrir el paso de combustible.
Es sencillo el sensor inductivo va
sufriendo una variación del campo
magnético con el paso de cada diente
que siempre es el mismo hasta el
momento en que falta un diente i su
variación se altera con eso se sabe
que el motor a dado una vuelta.
Mantenimiento y operación de equipos electrónicos de potencia
116